智能控制管道清洗机器人设计

打开文本图片集
中图分类号:TP242 文献标志码:A 文章编号:1001-5922(2026)03-0897-04
(燕山大学,河北秦皇岛
Design of intelligently controlled pipeline cleaning robot
ZHANG Jiahao (University On The Mountain Of Swallows,Qinhuangdao O66OO4,Hebei China)
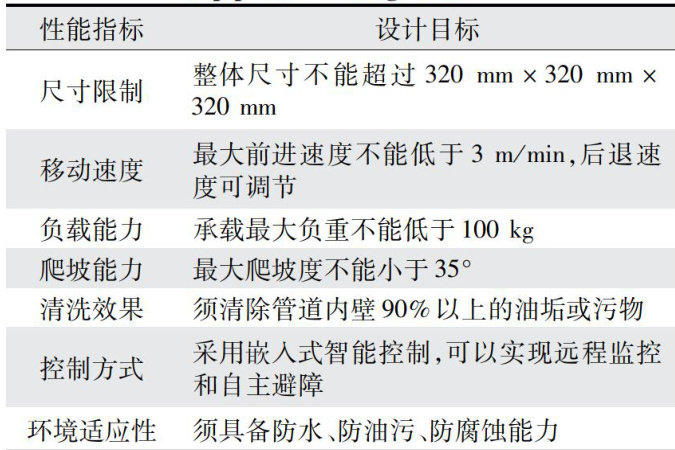
Abstract:Aimingattheproblemsoflowefficiency,highriskcoeffcientandpoorcleaning effectinthetraditional manual pipeline cleaning method,a design scheme of pipeline cleaning robot combining mechanical innovative design,intelligent controland visionsystem is proposed.Theoverallschemeof theintelligentlycontrolled pipeline cleaningrobot is designed,including thedesign of performance indicatorsandthe overallarchitecture design.Then, according totheoverall architecture,thecore parts oftherobotare designed,including the mechanical structure design and the intellgent control system design.Finally,through experimentsand tests,the comprehensive performance of the designed pipeline cleaning robot is verified.The test results show that thedesigned pipeline cleaning robot can freely cope with straight and curved pipes in the simulated sewage pipeline,with a slip rate of less than 5% ,a dirt removal rate of more than 90% ,aremote command delay time of the control system of less than 9O ms,and a continuous operation time of successfully avoiding obstacles of more than 3 hours.It is comprehensively verified hat therobotcan perform stable,eficientand high-qualitycleaning work inside thepipeline,has thecharacteristicsof high stability,high cleaning efciencyand rapid response of the control system,and has certain practicability and popularization value.
Key words : pipeline cleaning;mechanical innovation ;robot design;intelligent control; visual system管道系统在城市化进程不断加速以及工业基础 设施不断完善的背景下,已经成为能源输送、给排水
以及通风排烟等各个领域的重要组成部分。(剩余5405字)