机器人操作系统课程的四位一体教学改革刍议

打开文本图片集
中图分类号:G642
文献标识码:A DOI:10.16400/j.cnki.kjdk.2026.1.009
Discussion on the Four-in-One Teaching Reform of Robot Operating System Course
HU Huan, LIU Xiangquan, SUN Weiwei
College ofMechnicalandElectricalEnginering,Beijing InformationScience&Tchnology UniversityBeijing)
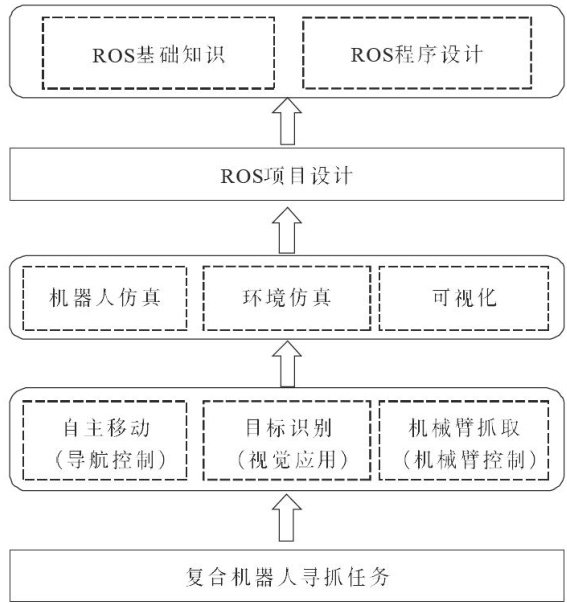
AbstractIn response to thecore contradictions ofcomplexityand starting point imbalance,conflicts between class hours and goals,and power and ability gaps in the course of robot operating systems,this article uses cuting-edge industry technology as the engine to reconstruct a practice led currculum system and proposes a four in one teaching model driven bythe four pillrs of "project-practice-achievement-resource" collaboration.Taking the applicationof compositerobots as theultimate goalofthecourse,complexity decouplingisachievedthroughastepped projectchain, and the teaching process is reconstructed based on the flipped classroom and the "learning by doing" concept. High density training is supported by online resource stacks,focusing on outcome orientation and using functional project works to drive students' endogenous learming motivation, effectively improving the quality of course teaching.
KeywordsROS; Practice-Oriented Teaching; Teach Designing
随着生成式AI掀起新一轮产业变革浪潮,高等教育面临重塑人才培养范式的历史性任务。(剩余4815字)
