基于2D-LiDAR与IMU融合的轨道机器人三维重建方法及误差补偿

打开文本图片集
中图分类号:TP242 文献标志码:A 文章编号:2095-2945(2026)08-0001-04
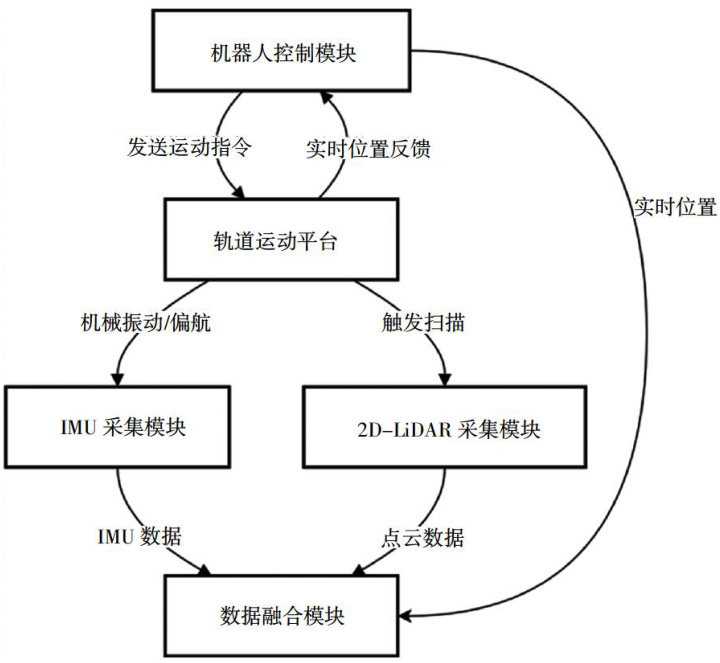
Abstract:To addressthe highcostof 3DLiDAR systems,thispaperproposesa multi-positionscanning-based 3D reconstructionmethodusingalow-cost2D-LiDAR mountedonarail-guidedroboticplatform.Byanalyzingtheimpactofyaw, heading,andpichangleerorsduringrobotmotiononpointcloudregistrationacuracy,IMUdataisintroducedformotion compensationAdditionall,atemporalalignment-basedIMUinterpolationalgorithmisproposedtoresolvedataasynchrony between heLiDARandIMU.Experimentalresultsdemonstratethatthisappoachsignificantlyenhancespointcloudregistration accuracy,achieving millimeter-scale 3D reconstruction.
Keywords:3Dreconstructionmethod;motionerorcompensation;IMUinterpolationalgorithm;orbitalrobot;2D-LiDAR
三维建模在工业检测、自动驾驶、灾害监测等领域具有重要应用价值。(剩余4786字)