一种基于机器学习的PID调参方法研究

打开文本图片集
中图分类号:TP23;TP391.9 文献标识码:A 文章编号:1672-3791(2026)01-0033-05
Research on a PID Parameter Adjustment Method Based on Machine Learning
HU Lingxia WAN Mujun
Zhongshan Torch Polytechnic, Zhongshan,Guangdong Province,5284Oo China
Abstract: In thecontextof therapid development of intellgent control technology,traditional ProportionalIntegral-Derivative (PID)control exhibits insuficient performance and adaptability in complexand variable environments.Toaddress this issue,this paper proposes a PID line-following tuning method basedon machine learning,aiming to enhance theflexibilityand robustnessof PID control.During cruise mode,this method collcts dualmotor drive values and photosensor values from the line-following vehicle,and constructs a driving model anda learning model in combinationwith preset parameters to adaptto the nonlinear andtime-varying characteristics of the environment.By leveraging machine learning technology and using a fixed driving time as the baseline,the method generates photosensor prediction values asociated with function groups,simulates the control efects of different PID parameter combinations,and automatically selects the optimal parameter combination that ensures highquality line following.Experimental results demonstrate thatthis method can effectively improve thecontrol performance and adaptive capability of the line-following vehicle in complex environments.
KeyWords: Machine learning; PID control; Line-tracking vehicle; Nonlinear control; Time-varying characteristics
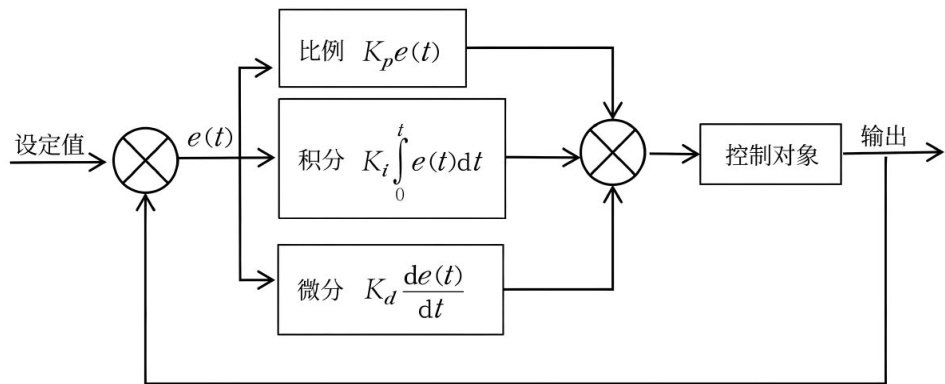
在自动化和智能控制领域,比例一积分一微分(Proportional-Integral-Differential,PID)控制器因具有简单性、鲁棒性和广泛的适用性而被广泛应用于各种工业和机器人系统中。(剩余4469字)