局部信息下的分布式无人集群自组织编队框架

打开文本图片集
关键词:分布式无人集群;局部邻域信息;复杂网络;多智能体强化学习;去中心化策略优化;自组织编队中图分类号:TP311.5文献标志码:A 文章编号:1001-3695(2026)01-026-0216-11doi:10.19734/j. issn.1001-3695.2025.06.0175
Distributed unmanned swarm self-organizing formation framework based on local information
Cui Zihan,Liu Wei†,XieWanzhen,Hu Diwei (SchoolofComputer Science&Engineering,Wuhan InstituteofTechnology,Wuhan43O2O5,China)
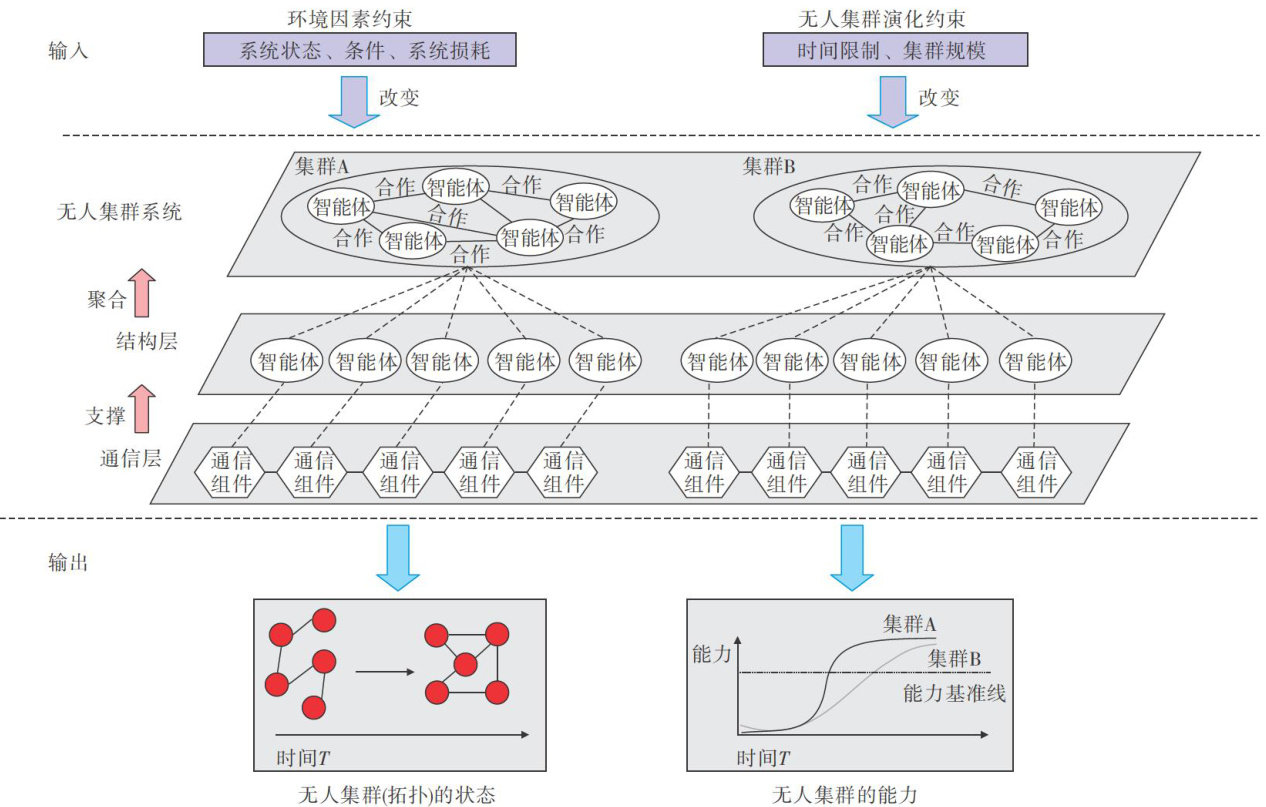
Abstract:This paper proposedadual-layer adaptiveformationframework toadresslowlocal information transmissionefficiency,slow individualresponse,andpoorglobalcoordinationindistributedunmannedswarmsunderdynamicandcomplex environmentswithcommunicationconstraints.Theframeworkbuiltadistributednetwork modelcombiningacommunication layerandastructurallayer.Inthecommunicationlayer,itappliedmulti-agentreinforcementlearningwithdecentralizedpolicyoptimization basedonlocalneighborhood informationtoachieveefficient information sharingand policyupdating.Inthe structurallayer,itintroducedadistributedtopologyreconfigurationmechanismtoenableflexibleadjustmentandeconstruction offormations indamagerecoveryandtask-splitingscenarios.Itembeddedadynamicdisturbancehandlingmechanismbetween thetwolayers toachieverapidadaptationandreconfigurationfornodefailuresandtaskchanges.Simulationresultsshowthat the proposed methodsignificantlyimproves task successratesandconvergence speed inanti-attck recoveryand formationspliting tasksacrossmultiple network topologies.Theframework demonstrates strong robustnessandadaptability,providingan efectiveapproachandtheoreticalsupportforeffcientcoaborationandstablefomationofunmannedswarmsunderlocalinformation constraints.
Keywords:distributedunmannedswarm;localneighborhoodinformation;complexnetworks;multi-agentreinforcement learning;decentralized strategy optimization; self-organizing formation
0 引言
无人集群系统(unmanned swarm system,USS)是由大量同构或异构智能体(如无人机、无人车、无人船等)及其配套的传感器、计算单元、通信设备构成的智能化系统。(剩余25340字)