基于双层模糊控制与改进遗传算法的移动机器人路径规划算法

打开文本图片集
关键词:改进遗传算法;路径规划;双层模糊控制系统;移动机器人
中图分类号:TP242.6 文献标志码:A 文章编号:1001-3695(2026)01-022-0183-08
doi:10.19734/j.issn.1001-3695.2026.06.0151
Path planning algorithm for mobile robots based on dual-layer fuzzy control and improved genetic algorithm
Tian Min†,Wu Xiaofeng (SchoolofManagement,XihuaUniversity,Chengdu61oo39,China)
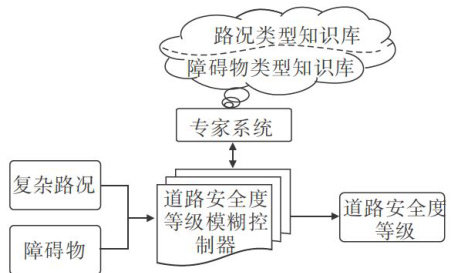
Abstract:Toenhancethepath safetyand planning eficiencyof mobilerobots performing multipletasks incomplexroad environments,this paperproposedamethodthatintegratedadual-layerfuzycontrolsystemwithanimproved geneticalgorithmto address thechalenges ofcomplexroadenvironmentsand diversifiedtask safetyrequirements in mobilerobotpath planning.It firstlydesignedadual-layerfuzzycontrol systembasedonexpertknowledge,thefirstlayertransformed complexroadconditionsandobstaclesintoroadsafetylevels,whilethesecondlayerincorporatedtasksafetylevelstogenerateadaptivefiness weightsforthegeneticalgorithm.Byintroducingroadsafetyfactorsintothefinessfunctionmodel,istrengthenedthesafetyof the planedpaths.Atthealgorithmiclevel,itoptimizedteselectioncrossover,andmutationoperationsusing Beroulichaoticmapping,aGaussanoperator,andaSymmetrical Sigmoidoperator,therebyimprovingglobal searchabilityandoptimizationeffciency.Experimental results showthat,compared toother algorithms,this method reduces path length byupto 5.9% and the number of turns by up to 85.7% .It also demonstrates strong generalizability and robustness in various comparative scenarios,,effectively addresses the interplay between complex road environments and task safety requirements.
Key words:improved genetic algorithm;path planning;two-tier fuzzy control system;mobile robot
0 引言
随着智能制造和无人系统的快速发展,移动机器人已广泛应用于仓储物流、工业生产、军事侦查等领域,其路径规划能力成为保障任务执行效率和系统安全性的关键。(剩余16597字)