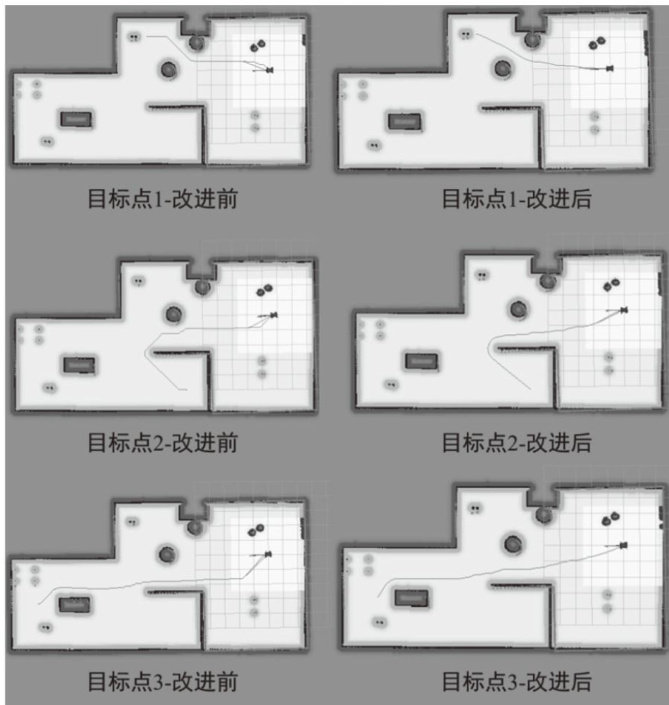
基于改进A\*算法的ROS移动机器人路径规划研究

打开文本图片集
一、前言
随着机器人在仓储物流、智能巡检与无人驾驶等领域的广泛应用,其自主导航能力已成为系统智能化的关键体现。路径规划作为实现自主导航的核心技术,旨在为机器人在复杂环境中规划出一条从起点到目标点、安全且高效的无碰撞运动轨迹。
根据环境信息掌握程度,当前路径规划算法主要分为全局规划与局部规划两类。全局规划依赖于已知环境地图,能够规划出全局意义上的最优路径,但其结果常存在转折过多、不够平滑的问题,且算法效率受启发式函数设计影响较大。(剩余5080字)
