注册帐号丨忘记密码?
1.点击网站首页右上角的“充值”按钮可以为您的帐号充值
2.可选择不同档位的充值金额,充值后按篇按本计费
3.充值成功后即可购买网站上的任意文章或杂志的电子版
4.购买后文章、杂志可在个人中心的订阅/零买找到
5.登陆后可阅读免费专区的精彩内容
打开文本图片集
键词:多自由度机械臂;内壁三维建模;清渣路径规划;遗传算法优化
中图分类号:TP241文献标志码:A
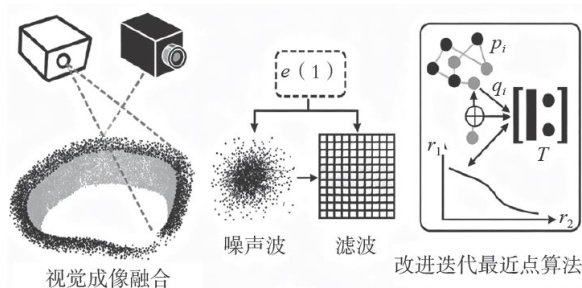
工业容器等设备的复杂内壁清渣是保障生产安全与设备寿命的关键环节,其内壁几何形态不规则且渣体分布零散不均,对清渣路径的精准性和高效性提出了严苛要求[1]。在当前清渣作业中,路径规划依赖的环境建模易受噪声干扰,难以完整还原内壁轮廓和渣体特征,导致机械臂作业时易出现碰撞风险或清渣遗漏,直接影响作业质量与安全性[2]。(剩余7809字)
登录龙源期刊网
购买文章
基于多自由度机械臂的复杂内壁清渣路径规划方法
文章价格:5.00元
当前余额:100.00
阅读
您目前是文章会员,阅读数共:0篇
剩余阅读数:0篇
阅读有效期:0001/1/1 0:00:00