基于改进Transformer-无迹卡尔曼滤波器的智能车辆多模态3D目标检测方法

打开文本图片集
主题词:无人驾驶 Transformer 多传感器信息融合 多模态感知无迹卡尔曼滤波器 中图分类号:TK411 文献标志码:A DOI:10.19620/j.cnki.1000-3703.20241037
Design and Experimental Validation of an Enhanced Transformer-UK Multi-Modal 3D Object Detection System for Intelligent Vehicles
Zhang Zhening¹2,Liu Zhen12,Wang Huaqiang12 (1.PureElectric VehiclePower System DesignandTesting HubeiProvincialKeyLaboratory,Hubei UniversityofArtsand Sciences,Xiangyang 441o53; 2.Schol ofAutomotiveand Transportation Engineering,Hubei Universityof Arts and Sciences,Xiangyang 441053)
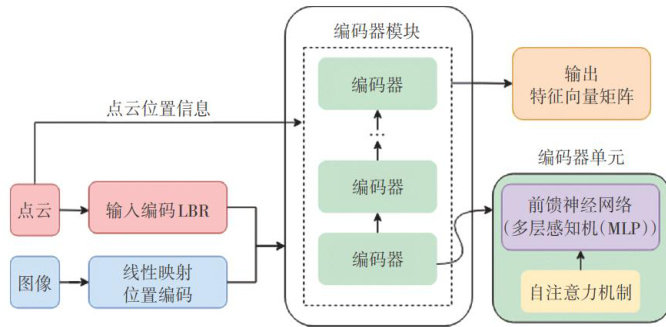
【Abstract]To enhance the accuracyof environmental perception andobjectdetection for intelligent vehicles,this paper proposes anovelfeaturefusion-based3Dobject detection method.First,the Transformer modelis improvedbyleveraginga multi-headself-attention mechanism tofullycapturelocal spatial feature informationwhile preservingdiversefeature weights, enablingtheextractionof pointcloudandimage features.An Unscented KalmanFilter(UKF)isthenutilized todesigna multimodalfusionsystem thatcombines image and pointclouddata,ultimatelyachieving 3Dobject detection.The proposed modelistrainedandtestedonboth publicandprivatedatasetsandiscomparedagainstseveral state-of-the-artalgorithms. Experimentalresultsdemonstratethattheproposedfeature fusion-based3Dobjectdetectionmodelachievesanimprovement in meanAverage Precision (mAP)of O.34 percentage points and3.03 percentage points compared to widelyusedalgorithms suchasF-ConvNetandF-PointNet,respectively.Forvehicleandcyclistdetection tasks,themAPincreasesby 2.52 percentage pointsand9.32 percentagepoints,respectively.Moreover,theinferenceresultsonreal-world vehicledataalign closelywith thetraining evaluationoutcomes.These findings indicatethattheproposedalgorithmimproves theaccuracyof objectdetectioninperceptionsystems toacertain extentand providesavaluablereference forthedesignof objectdetection systems in autonomous driving.
KeyWords:Autonomous driving,Transformer,Multi-sensor informationfusion,Multimodal perception, Unscented Kalman Filter (UKF)
【引用格式】张哲宁,刘祯,王化强.基于改进Transformer-无迹卡尔曼滤波器的智能车辆多模态3D目标检测方法[J].汽车技 术,2026(2): 39-47. ZHANG ZN,LIUZ,WANGHQ.DesignandExperimental Validationof anEnhanced Transformer-UKFMulti-Modal3D ObjectDetectionSystemfor IntelligentVehicles[J].Automobile Technology,2O26(2):39-47.
1前言
近年来,无人驾驶汽车环境感知技术发展迅速,目标检测作为环境感知的基础性关键环节备受关注。(剩余12194字)
