基于改进PointPillars的激光雷达三维目标检测算法

打开文本图片集
主题词:激光雷达 三维目标检测 体素特征稀疏卷积中图分类号:U495 文献标志码:A DOI:10.19620/j.cnki.1000-3703.20240211
LiDAR-Based 3D Object Detection Algorithm Based on Improved PointPillars
Guo Liel²,Huang Liang1, Zhao Yibing1 (1.Schoolof Mechanical Engineering,Dalian Universityof Technology,Dalian16O24;2.Ningbo InstituteofDalian University of Technology,Ningbo 315016)
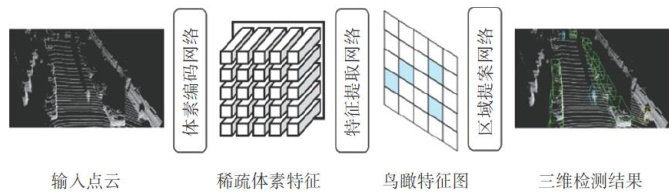
【Abstract】To avoid the missng detection phenomenon caused by loss of local features due to the occlusion and truncationundercomplextraffcscenes,aLiDAR-based3DobjectdetectionalgorithmbasedonanimprovedPointPillars framework isproposed.First,thepointcloudfeatureencodingnetworkinPointPilarsisenhancedtobeterpreserveimportant structuralinformationandtherelationships withinthepointclouddata.Then,multi-scalepointcloudfeaturesareextracted andaggregated through stacked sparseconvolution modulesand submanifoldconvolution modules.Onthe bird’s-eye-view featuremapthatfusesthesemulti-scalefeatures,3Dboundingboxesofobjectsareclasifiedandregressed,improvingthe network’soperationaleficiency.Finaly,experimental testsareconductedontheKITTIdataset.Theresultsshowthat compared tothetraditionalPointPillrsalgorithm,theproposed3Dobjectdetectionmethodimproves theAveragePrecision (AP)of3Ddetectionforchallengingvehiclesamplesby6.O2percentagepoints,andincreasestheAPforsimplepedestrianand cyclistsamplesinthebird’s-eyeviewby3.35and3.18percentagepointsrespectively,efectivelyenhancing3Dobject detection accuracy.
Keywords:LiDAR,3D object detection,Pillar features,Sparse convolution 【引用格式】郭烈,黄亮,赵一兵.基于改进PointPillars 的激光雷达三维目标检测算法[J].汽车技术,2026(2):32-38. GUOL,HUANGL,ZHAOYB.LiDAR-Based3DObject DetectionAlgorithm Basedon ImprovedPointPillars[J]. Automobile Technology,2026(2): 32-38.
1前言
准确高效的环境感知是实现可靠自动驾驶的核心前提。(剩余11236字)
