3-R(Pa)RU并联机构踝关节康复机器人运动学分析

打开文本图片集
中图分类号:TP242 文献标识码:A
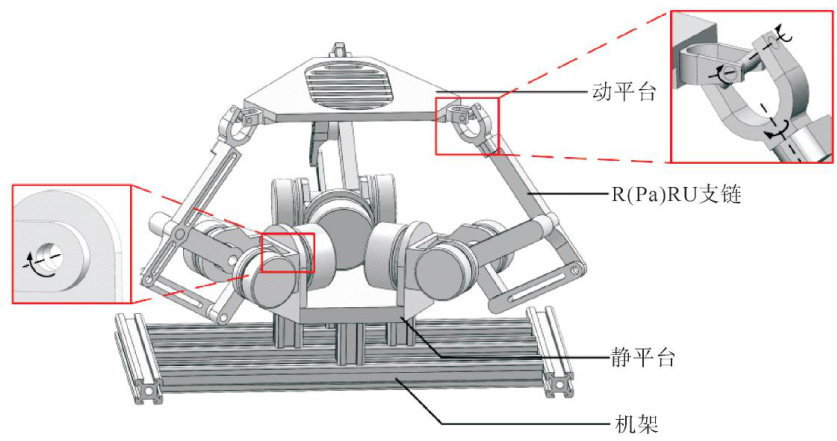
Abstract:To address the issues of insufficient degrees of freedom,low fidelity in motion characteristics,and misalignment of rotation centers in existing ankle rehabilitation robots,a 3-R(Pa) RU(3-Revolute Joint-Paralllogram-Revolute Joint-Universal Joint) parallel mechanism ankle rehabilitation robot is designed to enhance the efficacy and adaptability of rehabilitation training. This study primarily focuses on analyzing the fundamental performance of the parallel mechanism.A mathematical model of the mechanism is established through configuration design and coordinate transformation,and both numerical and analytical methods are employed to solve its forward and inverse kinematics. Singular configurations are identified based on the reciprocity between transmission wrench screws and joint twist screws,and the platform pose and workspace are analyzed using MATLAB. Simulation results demonstrate that the moving platform achieves spatial motions of ±300mm alongthe X -and Y -axes,and 250mm~570mm along the Z -axis, with no singular configurations detected throughout the entire workspace. The simulation results validate the rationality of the configuration and the stability of its motion,confirming its capability to achieve comprehensive ankle joint rehabilitation training.
Keywords:parallel mechanism,ankle rehabilitation robot,forward and inverse kinematics,singularity analysis
踝关节结构复杂,在步行、奔跑等日常活动中承受体重 4~8 倍的冲击载荷,成为运动系统中最易损伤的部位之一[1-2]。(剩余9735字)