基于最大熵深度强化学习的主动悬架控制策略研究

打开文本图片集
中图分类号:U463.1 文献标识码:A
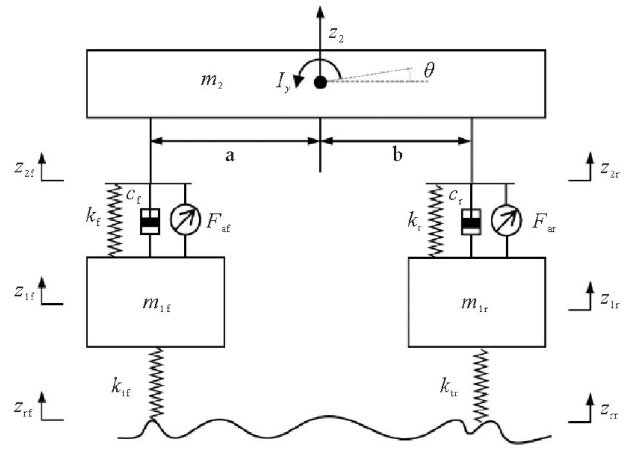
Abstract: To further enhance the vertical dynamics performance the active suspension system, a control strategy based on the maximum entropy deep reinforcement learning (St Actor-Critic, SAC) algorithm is proposed. A training environment for the maximum entropy reinforcement learning algorithm was established using a four degree freedom half-vehicle active suspension model. Primary auxiliary reward functions were designed to optimize the algorithm's learning speed, simulations were conducted using both bump rom road priles for online learning verification the control strategy. Simulation results demonstrate that,compared to a passive suspension system,the maximum entropy deep reinforcement learning-based control strategy reduces the peak root mean square values the vehicle body vertical acceleration the vehicle body pitch angular acceleration by 44.12% 21.08% ,respectively,on the bumpy road, by 43.59% 44.63% ,respectively,on the rom road,effectively improving vehicle ride comfort hling stability.
Keywords: active suspension; maximum entropy; reinforcement learning; control strategy; reward function
主动悬架系统具有外部能源输人,能提高车辆行驶舒适度与操控稳定性,控制策略是该系统中影响控制效果的关键因素之一[1]。(剩余7768字)