基于三维智能识别的仿生机械手远程控制系统

打开文本图片集
中图分类号:TP241 文献标志码:A 文章编号:2095-2945(2026)04-0066-04
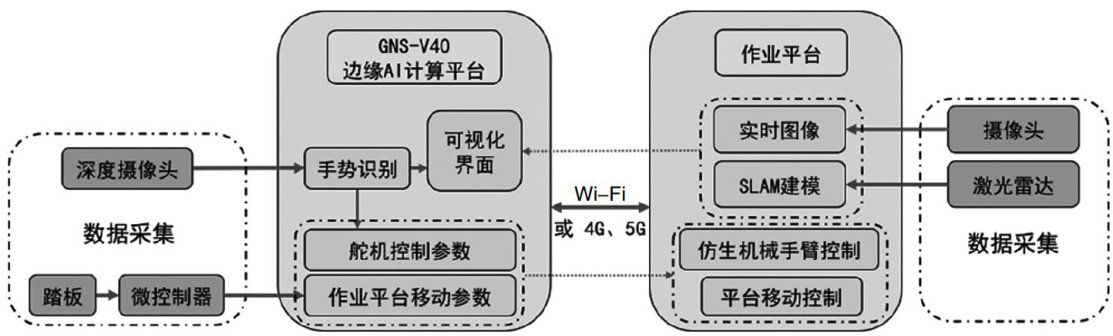
随着计算机硬件性能不断提升,深度学习边缘计算在自动驾驶、图像识别、自然语言处理和类脑科学等领域获得了充足的应用。本文基于深度学习的RGB-D相机设计了基于三维智能识别的灵巧手远程控制系统。本系统通过深度相机直接采集用户手势点云,并利用PointNet神经网络实时识别手势21个关键节点,利用无线网络远程发送到移动作业平台,操控作业平台上的仿生机械手,实现远程的仿生机械手实时操控功能。(剩余3611字)
