基于粒子滤波的Stewart平台正运动学求解

打开文本图片集
关键词:并联机构;SteWart平台;正运动学;粒子滤波;强耦合系统;非线性系统中图分类号:TP242;TH112 文献标识码:Adoi:10. 37188/OPE. 20253323.3691 CSTR:32169.14.OPE.20253323.3691
Abstract:Pose estimation of a Stewart platform is critical for achieving high-precision motion control,yet its forward kinematics problem remains challnging due to the strong coupling between pose variables and actuator lengths,the pronounced nonlinearity of the governing equations,and the presence of singular configurations. Conventional numerical algorithms often exhibit poor convergence and unstable estimation accuracy,particularly in proximity to singular regions.To enhance the stabilityand accuracy offorward kinematics computation,a novel solution based on a particle filter (PF) is proposed. A state-space model that incorporates both pose variables and actuator lengths is formulated,and probabilistic state inference is performed within the PF framework,thereby mitigating estimation difficulties associated with singular config urations.MATLAB simulations demonstrate that,relative to traditional methods,the proposed algorithm reduces mean absolute error (MAE) by 85.35%99.43% and root mean square error (RMSE) by (204号 86.98%99.79% . These results confirm that the proposed approach achieves accurate forward kinematics estimation under complex operating conditions,ofering strong adaptability,high robustness,and superior convergence behavior,and indicating substantial potential for practical engineering applications.
Key words: parellel mechanism; Stewart platform;forward kinematics;particle filter; strongly coupledsystem;nonlinear system
1引言
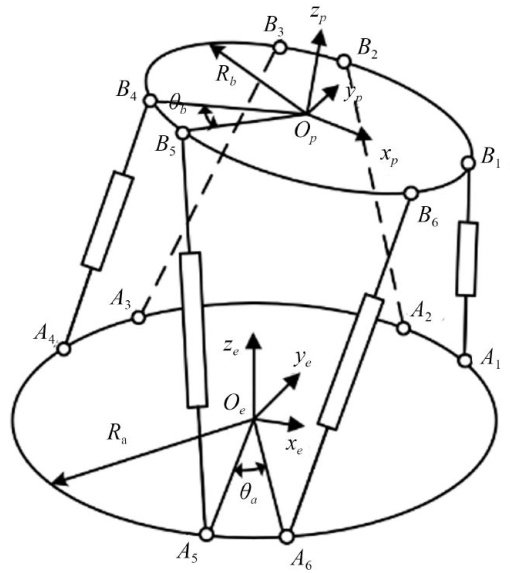
Stewart平台是一种典型的六自由度并联机构,相比于串联机构,具有结构紧凑、承载能力强、运动精度高、惯性低等优点,因此广泛应用于飞行模拟器、虚拟驾驶、精密装配等复杂工况中[1-6]。(剩余12016字)