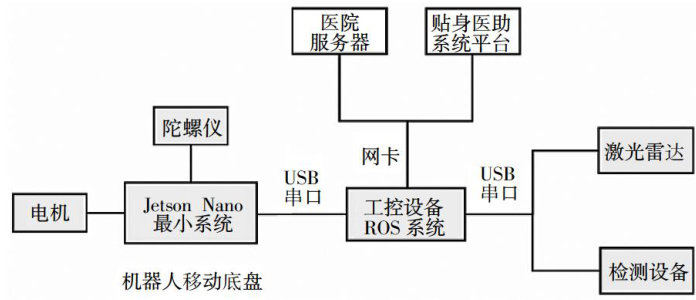
基于ROS系统的就医陪诊机器人设计及算法实现

打开文本图片集
中图分类号:TP242 文献标志码:A 文章编号:2095-2945(2025)30-0037-04
Abstract:Withtheintensificationoftheglobalpopulationaging trendandthecontinuousimprovementofpeople'squality requirementsforthemedicalserviceindustryinteligentmedicalandaccompanyingserviceshavebecomeanimportantdevelont directioninthemedicalandhealthfield.Theteamproposedadesignandalgorithmimplementationplanofamedical accompanyingrobotbasedontheROSsystem.Throughreasonablehardwareselectionandalgorithmdesign,therobotcanrealize onlinereservations,autonomousnavigation,obstacleavoidance,folowing,lifingandprintingmedicalrecords.,real-time synchronizationof patientmedicalrecordsandtransmisionof patienttreatmentscreenstothesystemplatfomandotherfunctions toprovidepatientswithmoreeficientandconvenientmedicalaccompaningservicesadimprovethepatientsedicalexperience.
Keywords:ROSsystem;medicalash conveyingrobot;softwareandhardwaredesign;algorithmdesign;medical health
在当代医疗体系中,患者往往面临着就医流程复杂、科室位置分散等问题,尤其是对于老年人,由于其子女工作繁忙,在老人身体出现问题时无法及时陪同老人进行就医。(剩余5130字)
