注册帐号丨忘记密码?
1.点击网站首页右上角的“充值”按钮可以为您的帐号充值
2.可选择不同档位的充值金额,充值后按篇按本计费
3.充值成功后即可购买网站上的任意文章或杂志的电子版
4.购买后文章、杂志可在个人中心的订阅/零买找到
5.登陆后可阅读免费专区的精彩内容
打开文本图片集
中图分类号:U463.6 文献标志码:A DOI: 10.20104/j.cnki.1674-6546.20250276
1前言
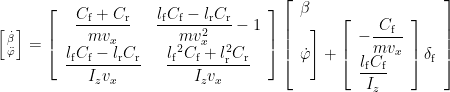
四轮独立驱动架构凭借其结构简单、传动效率高、驱动力矩分配灵活和对车轮转矩的精准调控能力,为改善复杂工况下的车辆稳定性提供了必要的硬件保障。在紧急场景下,轮胎的侧向力已近饱和,而其纵向力更具操控潜力,故直接横摆力矩稳定性控制已成为该领域的重要研究内容。(剩余9714字)
登录龙源期刊网
购买文章
基于自适应非奇异滑模的四轮独立驱动电动汽车稳定性控制
文章价格:5.00元
当前余额:100.00
阅读
您目前是文章会员,阅读数共:0篇
剩余阅读数:0篇
阅读有效期:0001/1/1 0:00:00