注册帐号丨忘记密码?
1.点击网站首页右上角的“充值”按钮可以为您的帐号充值
2.可选择不同档位的充值金额,充值后按篇按本计费
3.充值成功后即可购买网站上的任意文章或杂志的电子版
4.购买后文章、杂志可在个人中心的订阅/零买找到
5.登陆后可阅读免费专区的精彩内容
打开文本图片集
中图分类号:U463.33;TP13 文献标志码:A DOI:10.20104/j.cnki.1674-6546.20250002
1前言
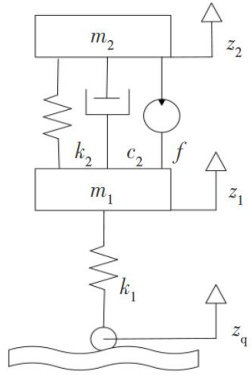
化实时提供所需的理想控制力,保证行驶过程中车辆的平顺性和操纵稳定性。近年来,研究人员针对主动、半主动悬架系统的控制提出了多种控制方主动悬架可随车辆运动状态和外界激励的变法,其中以线性二次最优控制理论为基础的主动悬架控制技术发展最快。(剩余6578字)
登录龙源期刊网
购买文章
基于红嘴蓝鹊线性二次型调节器的主动悬架控制策略研究
文章价格:5.00元
当前余额:100.00
阅读
您目前是文章会员,阅读数共:0篇
剩余阅读数:0篇
阅读有效期:0001/1/1 0:00:00