轻韧型软体夹持器的仿生设计与研究

打开文本图片集
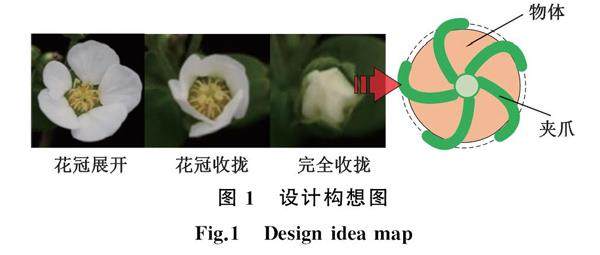
摘要:为了使夹持装置柔软度和承载力兼备,受草本植物茎与花冠结构启发,设计了类似花冠收拢的螺旋式包络和仿植物茎刚度增强方案,每个夹爪呈螺旋状弯曲,通过在夹爪结构内逐个腔室横截面方向嵌入筋板来增大末端输出力,在对变形角度影响较小的条件下有效增大了夹爪末端输出力,并对改善软体执行器的迟滞性有显著效果。制作、组装软体夹爪进行了测试,试验结果表明,轻韧型软体夹持器在自重较轻和收拢尺寸较小的情况下,具备良好展开、包络和承载能力,不仅对轴对称形物体有良好的抓持效果,对于传统夹持器难以夹持的非对称形物体,除花冠式收拢动作外,夹爪还能缠绕物体以增强夹持效果。(剩余13019字)
