基于改进双向快速扩展随机树算法的智能汽车路径规划研究

打开文本图片集
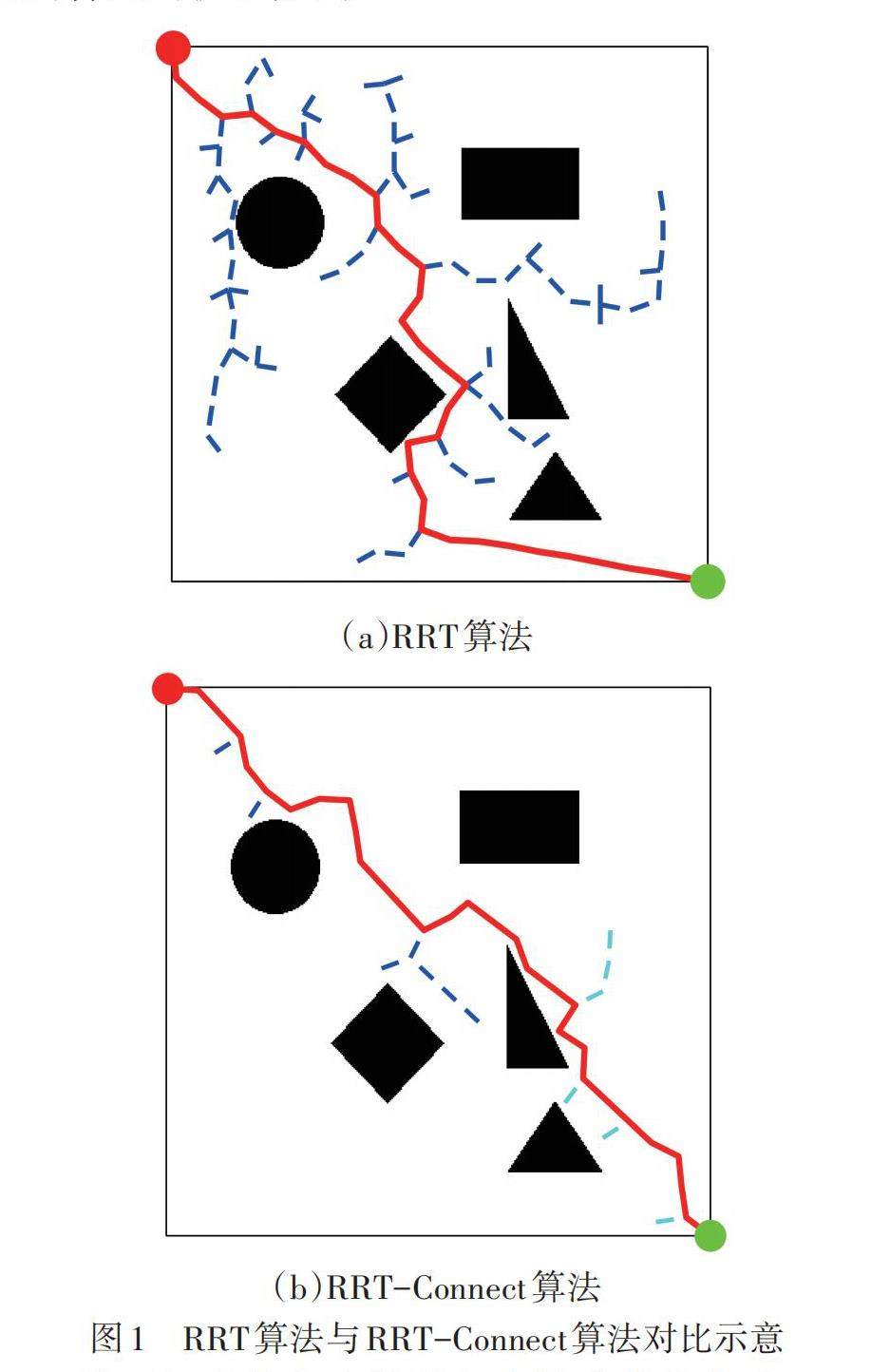
【摘要】针对智能汽车路径规划中双向快速扩展随机树(RRT-Connect)算法获得的路径不是最优解和狭小通道探索性能较差的问题,在分析RRT-Connect算法基本原理的基础上,对其在扩展策略和路径平滑等方面进行了改进。首先,引入概率偏向法对选取的随机点进行筛选,并基于人工势场进行扩展,以缩短路径和计算时间,然后,引入三次B样条曲线对路径进行优化,生成光滑路径,保证路径满足智能汽车的动力学特性,最后,通过仿真验证改进RRT-Connect算法的性能,结果表明,在简单障碍物、复杂障碍物和狭窄路径环境下,改进的RRT-Connect算法的平均路径长度和平均耗时均优于传统RRT-Connect算法。(剩余9695字)
