适用于螺旋驱动式胶囊机器人内窥镜的双端接收线圈设计与实验

打开文本图片集
关键词:胶囊机器人;内窥镜;无线能量传输;螺旋驱动式运动机构;双端接收线圈;无线能量传输效率中图分类号:R318.6;TM15文献标识码:Adoi:10.37188/OPE.20263403.0415 CSTR:32169.14.OPE.20263403.0415
Design and experiment of dual-end receiving coil for helical drive capsule robot endoscopes
WEN Renqing 1,2 ,YAN Guozheng2*,HAN Ding², JIANG Pingping1,WANG Zhiwu1
(1. School ofAutomation and Intelligent Sensing,Shanghai Jiao Tong University, Shanghai 200240, China; 2. School of Biomedical Engineering, Shanghai Jiao Tong University, Shanghai 2OO24O, China) * Corresponding author, E -mail: gzhyan@sjtu. edu. cn
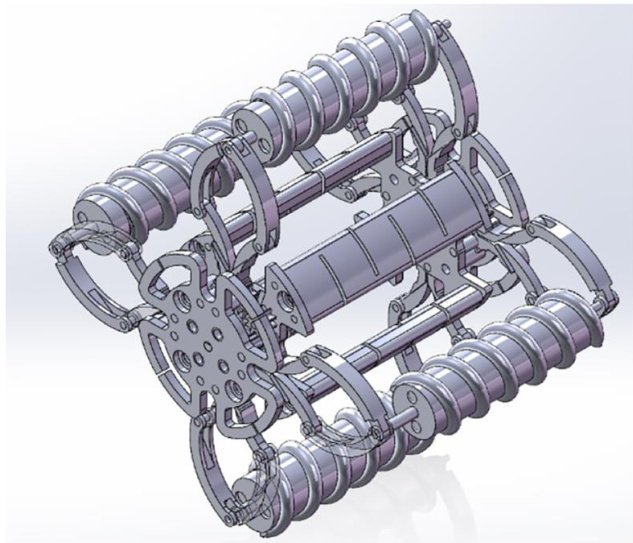
Abstract: Wireless capsule endoscopes provide a noninvasive approach for intestinal examination but remain limited by the absence of active mobility.To address this constraint,a capsule robotic endoscope based on an active motion platform was developed.A helical drive mechanism was designed to enable versatile locomotion through control of the rotational speed and direction of the helical drive unit. To accommodate this mechanical configuration,dual-ended receiving coils were designed,and the electrical parameters of coils with different topological structures were derived through theoreticalanalysis and mathematical modelig. The performance of the proposed coil topologies was subsequently assessed by simulation and validated through experimental testing. The results demonstrate that a rectifier-folowed-by-series topology provides high stability for the dual-ended receiving coil,achieving a power transfer eficiency of 2. 75% at 981mW induced power. Pipeline experiments further confirm that the wireless power transfer system satisfies the power demands required for capsule endoscope robot locomotion and control.
Key words:capsule robots;endoscope;wireless power transfer;helical drive motion mechanism;dualend receiving coil;wireless power transfer efficiency
1引言
胃肠道在消化、营养吸收和代谢过程中发挥着关键作用。(剩余12355字)