转速调控下的激光雷达探测器位置像移匹配方法

打开文本图片集
关键词:激光雷达;探测器位置匹配;像点偏移;转速调控;光学扫描有效探测范围中图分类号:TN958.98 文献标识码:Adoi:10.37188/OPE.20253322.3441 CSTR:32169.14.OPE.20253322.3441
Abstract: In mechanical scanning LiDAR,high-speed mirror rotation during long-distance detection in duces an echo lag angle,causing image point deviation from the detector center and limiting the Optical Scanning Effctive Detection Range (OSEDR). A detector position matching method via scanning mirror speed control was proposed. First,a quantitative OSEDR model was established to describe the relationship among image point ofset, scanning mirror rotation speed,target distance/azimuth,and optical system parameters. Then,based on the model,the rotation speed of the scanning miror was adjusted,allowing conventional stable targets to serve as the feedback benchmark,replacing the specific long-distance tar gets required in traditional methods for detector position matching. Experimental results on a tower-based mirror scanning LiDAR system show that at the rated speed of 50r/s ,the maximum detection range increases from 1020m to 2000m ,with an improvement of approximately 96% ,meeting the theoretical detection range requirements. Moreover,the point clouds within this range are continuous and stable without obvious gaps. This method expands the selection of available feedback targets during debugging and pro vides a reliable and efficient approach to detector position matching in the assembly and alignment of mechanical scanning LiDAR systems.
Key words:LiDAR;detector position matching; image point ofset;rotational speed control; Optical Scanning Effective Detection Range(OSEDR)
1引言
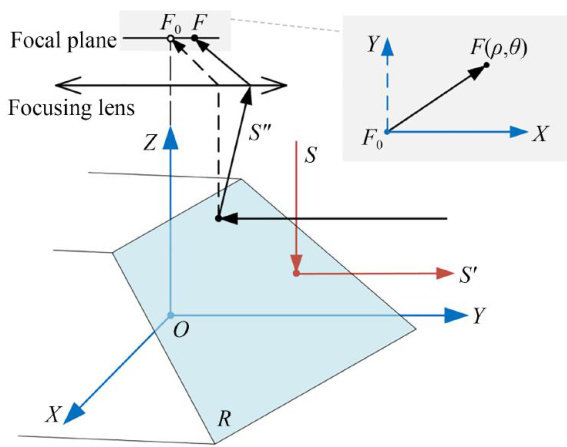
机载激光雷达系统常采用机械扫描方式以实现大视场探测[1-3],但激光飞行时间内扫描镜持续转动引入回波滞后角,导致回波像点偏离探测器光敏面中心[4]。(剩余10658字)