宏-微-纳跨尺度粘滑型压电驱动器动力学建模与试验评价

打开文本图片集
关键词:粘滑型压电驱动器;跨尺度;精密定位;动力学建模中图分类号:TH122 文献标识码:Adoi:10.37188/OPE.20253320.3252 CSTR:32169.14.OPE.20253320.3252
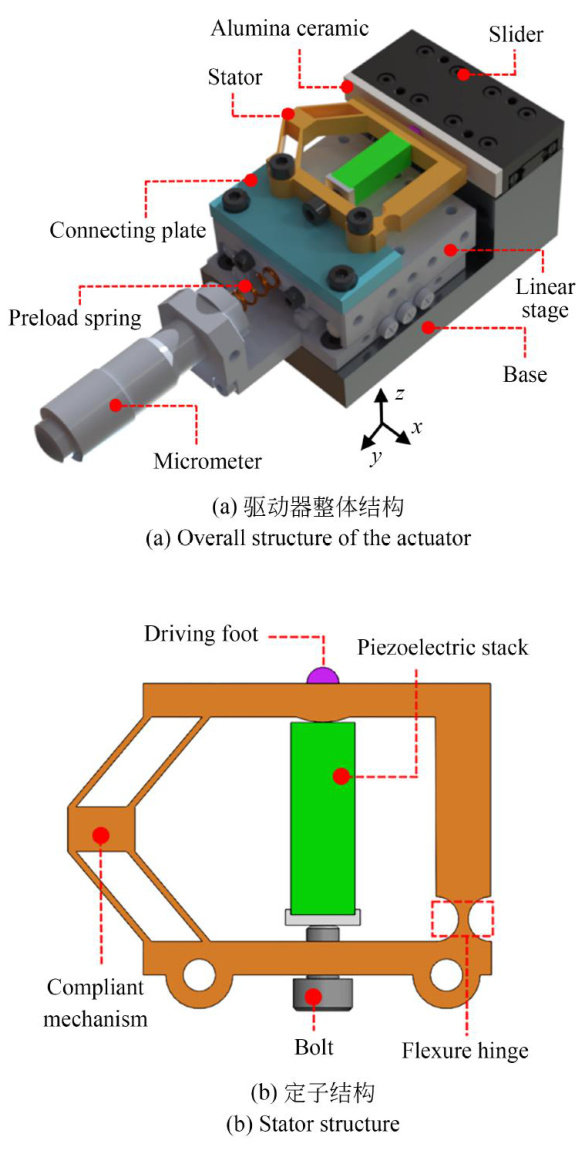
Abstract: To meet the precision driving requirements of wafer inspection systems and the internal optical systems of scanning electron microscopes (SEMs) in the field of micro-nano electronics manufacturing,a stick-slip piezoelectric actuator with Macro-Micro-Nano cross-scale drive was proposed in this study. First,the structural design of the slider and stator of the actuator and its driving principle were elaborated in detail,and the dimensional parameters of the stator structure were optimized by finite element simulation method. Then,the dynamic model of the actuator was constructed to analyze its stepping characteristics. The simulation results showed that the actuator was capable of micro-stepping displacement. Finally,the prototype of the actuator was fabricated,and the experimental system was built to evaluate its output performance. The experimental results indicate that the proposed actuator exhibits a maximum no-load speed of 20.3mm/s ,a maximum step displacement of 15.82μm ,a positioning resolution of 70nm ,and a maximum load of 2.2N ,which can meet the cross-scale driving requirements of macro large-stroke continuous movement,micro-scale step displacement,and nano-scale high-precision positioning.This study provides an essential theoretical and experimental basis for the application of stick-slip piezoelectric actuators in critical scenarios such as the alignment of aperture plates in SEM optical systems and wafer inspection platforms.
Key words: stick-slip piezoelectric actuator; cross-scale;precision positioning; dynamic modeling
1引言
近年来,随着微纳电子制造领域的快速发展,对更先进的精密驱动技术的需求也变得日益迫切,尤其是在大规模集成电路加工1过程中晶圆检测系统及所用扫描电子显微镜光学系统内部,需要依托具有宏-微-纳跨尺度大行程驱动、微秒级响应速度、控制系统简单及结构灵活紧凑等性能指标的驱动装置对材料和设备进行精确的控制和操作。(剩余14919字)