基于单目视觉的集装箱角件自动对位

打开文本图片集
关键词:单目视觉;集装箱;自动对位;目标识别;位姿估计中图分类号:TH247;TP29 文献标识码:Adoi:10.37188/OPE.20253319.3150 CSTR:32169.14.OPE.20253319.3150
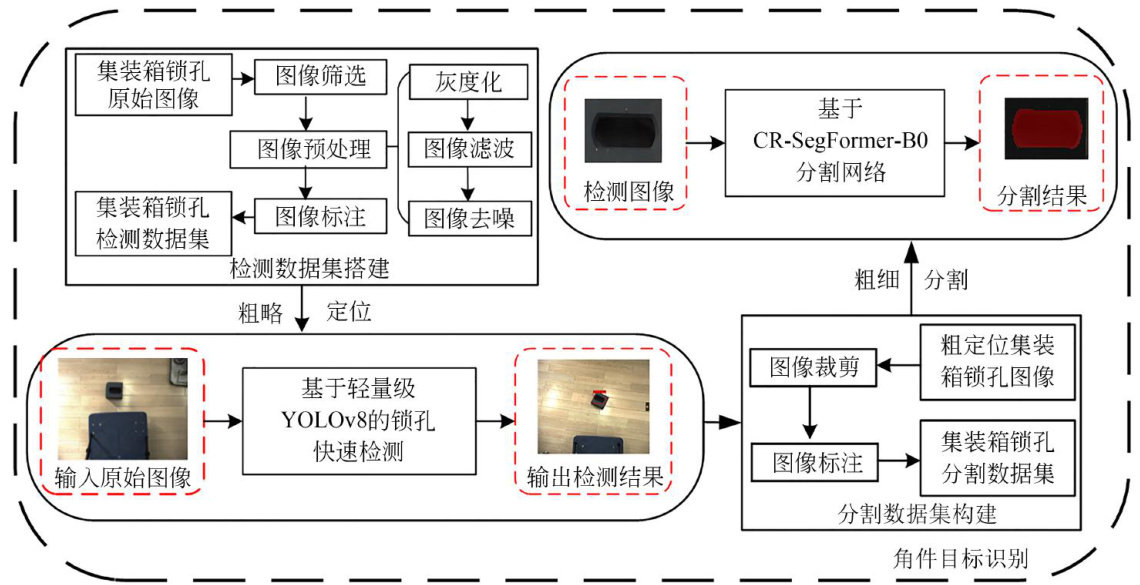
Abstract: To enhance the eficiency of container loading and unloading and realize automated operations, this study investigates monocular-vision-based automatic alignment between spreader and container,integrating deep learning and image-processing techniques. Monocular images of container hoisting conditions were analyzed with emphasis on the regional characteristics of corner components.To addressthe low pixel proportion of corner regions in high-resolution images,a two-stage "coarse positioning-fine segmentation" strategy Was proposed.Based on the segmentation results,key feature points were detected,2D-3D point correspondences were established,and pose estimation was performed using the Levenberg-Marquardt algorithm. Validation was conducted on an AUBO-ilO manipulator alignment platform in laboratory setings. Experimental results demonstrate that the mean average precision (mAP) for detection of container corner components exceeds 95% in both laboratory and real-scene environments. Mean intersectionover-union (mIoU) for corner segmentation reached 98.15% and 93.89% ,respectively-improvements of (20 1.24% and 1.64% over the baseline SegFormer-BO-while model computational cost was reduced by approximately 23.2% . At a camera-to-corner distance of about 2m ,the aiming error of the alignment positionwas below 1.0mm . Absolute translation errors on the X , Y ,and Z axes were all below 5.0mm , and absolute rotation error was below 0.5∘ . These results indicate that the proposed method achieves reliable accuracy and satisfies the requirements for automatic alignment of single-angle components.
Key words: monocular vision; containers; automatic alignment; target recognition; pose estimation
1引言
近年来,随着全球经济的快速增长,集装箱运输业得到了快速发展,集装箱运输通过标准化的装载和运输方式,大大提高了货物的运输效率和安全性,降低了物流成本,促进了国际贸易的繁荣[1]。(剩余14356字)