基于点线面特征的位姿解耦RGBD-SLAM

打开文本图片集
中图分类号:TP242 文献标识码:Adoi:10. 37188/OPE. 20253306. 0993 CSTR:32169. 14. OPE. 20253306. 0993
Pose decoupled RGBD-SLAM based on point-line-plane features
YANG Gang,ZHANG Wengang*,CAO Tianle (College of Communication and Information Engineering,Xi'an University of Posts and Telecommunications,Xi'an ,China) * Corresponding author,E-mail:wengz0208@163. com
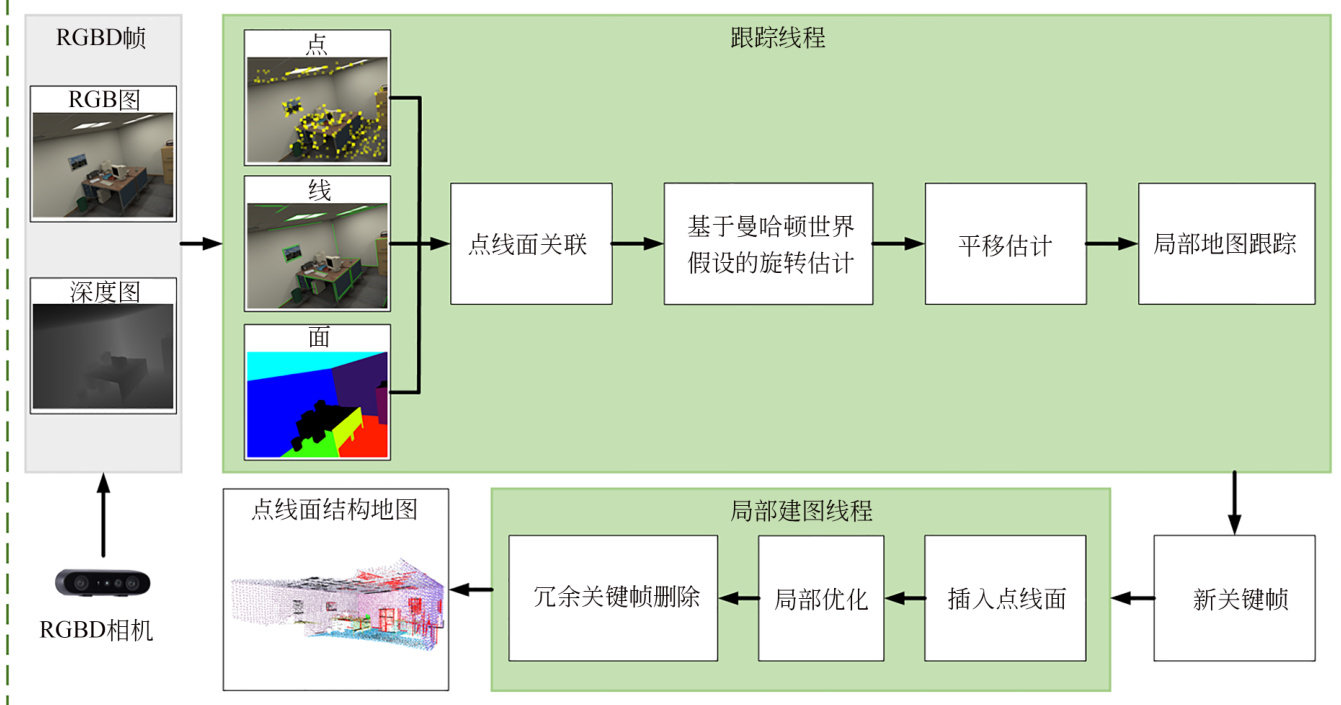
Abstract:To address the issue of low pose estimation accuracy or complete failure of visual simultaneous localization and mapping(SLAM)algorithms that relied solely on single-point features in indoor environ⁃ ments characterized by sparse texture and varying illumination conditions,a pose-decoupled RGBDSLAM system based on point,line,and plane features was proposed. This system leveraged the comple⁃ mentary advantages of different features and the structured characteristics of the scene,employing the con⁃ cept of pose decoupled estimation. By utilizing the Manhattan World hypothesis,drift-free rotation estima⁃ tion was achieved,while translation was estimated through the minimization of a multi-feature joint error function. This approach mitigated the cumulative error effects associated with traditional SLAM systems that employed frame-by-frame tracking,thereby enhancing the accuracy of pose estimation and facilitating the construction of a richly informative point-line-plane structural map of the environment. Experimental results indicate that the proposed SLAM system achieves an average absolute trajectory accuracy improve⁃ ment of 54.5% , 23.5% ,and 28.3% compared to ORB-SLAM2,PL-SLAM,and SP-SLAM,respec⁃ tively,across eight subsequences of the ICL-NUIM dataset. Additionally,in eleven subsequences of the TUM RGBD dataset,improvements of 33.9% , 26.2% ,and 11.7% are observed,demonstrating superi⁃ or global localization performance and enhanced system robustness. Furthermore,the constructed pointline-plane structural map provides a more comprehensive representation of the environment.
Key words:SLAM;point-line-plane features;pose decoupling;weak texture environment;illumination varying environment
1 引 言
在消防救援和反恐特战等许多应急场景下,行动现场往往是结构复杂且封闭的室内环境,由于大多行动缺乏现场地图,导致行动充满盲目性,严重威胁行动人员生命安全。(剩余18623字)