多级图特征融合引导相机位姿回归

打开文本图片集
中图分类号:TP394. 1;TH691. 9 文献标识码:Adoi:10. 37188/OPE. 20253306. 0928 CSTR:32169. 14. OPE. 20253306. 0928
Multi-level feature fusion for camera pose regression
SI Junwen,ZHOU Ziwei*
(College of Computer and Software Engineeringng,University of Science and Technology Liaoning, Anshan ,China) * Corresponding author,E-mail:381431970@qq. com
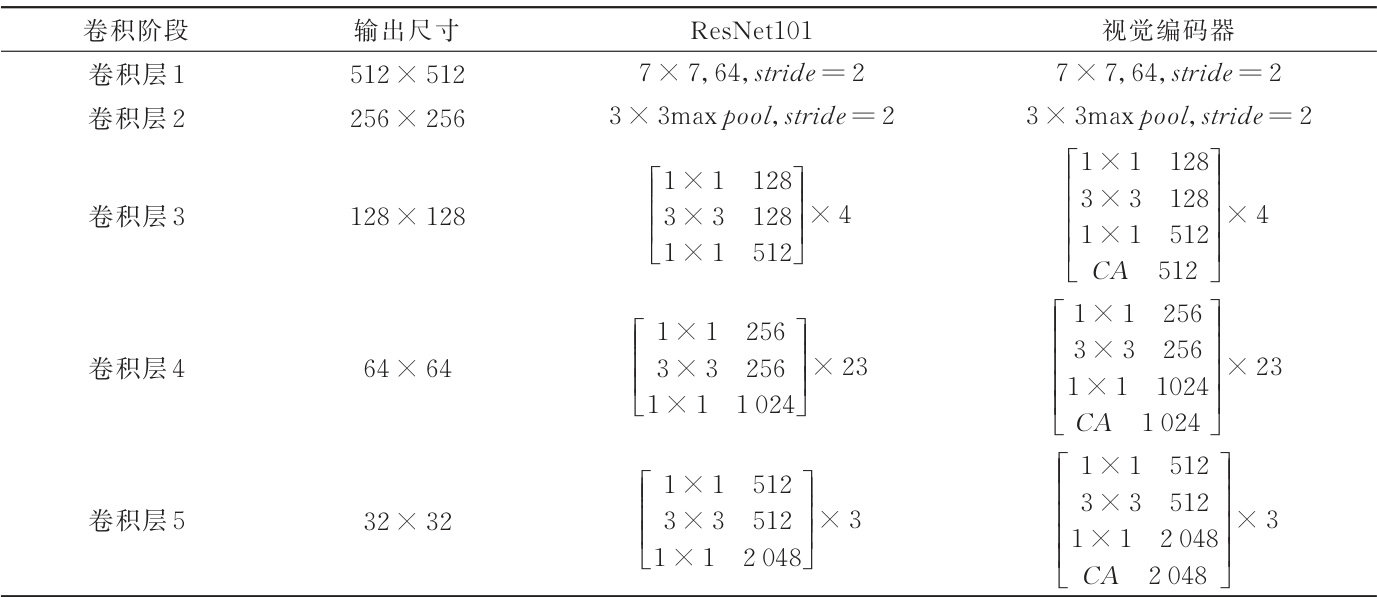
Abstract:To improve the accuracy and stability of camera pose estimation in complex scenarios,this pa⁃ per independently designed the ResGraphLoc network. This network further enhanced the pose regression accuracy of the camera in scenarios with occlusion,illumination changes,and low texture by introducing the residual network and the graph attention mechanism. The network adopted ResNet101 as the feature encoder and enhanced the significant feature extraction ability through the improved residual block. The graph attention layer was utilized to fuse multi-level feature maps and realized feature information diffusion and aggregation through the multi-head self-attention mechanism. Finally,the position and angle features were extracted from the feature embedding through the nonlinear MLP layer to complete the end-to-end camera pose regression. On the large-scale outdoor dataset,the pose error of the ResGraphLoc model was superior to the existing algorithms. In the LOOP and FULL scenarios,the pose regression results are 7.18m , 2.48∘ and 16.96m , 3.16∘ respectively,with an improvement of more than 25% compared to the benchmark model. In the 4Seasons dataset's Neighborhood scenario,the outdoor localization error can be as low as 1.40m and 0.76∘ . In the indoor dataset with missing and repetitive textures,the position and an⁃ gle regression results can reach 0.08m and 3.25∘ respectively. The experimental results verify the high ac⁃ curacy and stability of ResGraphLoc in complex environments and can effectively cope with occlusion,illu⁃ mination changes,and low texture scenarios.
Key words:computer vision;camera pose estimation;camera localization;graph attention;multi-level feature fusion
1 引 言
随着人工智能的发展,虚拟现实、自主移动机器人、智能无人机和自动驾驶等领域已经成为学术界研究的热点。(剩余23776字)