面向智能车辆的路面凹凸障碍物识别方法研究

打开文本图片集
摘要:
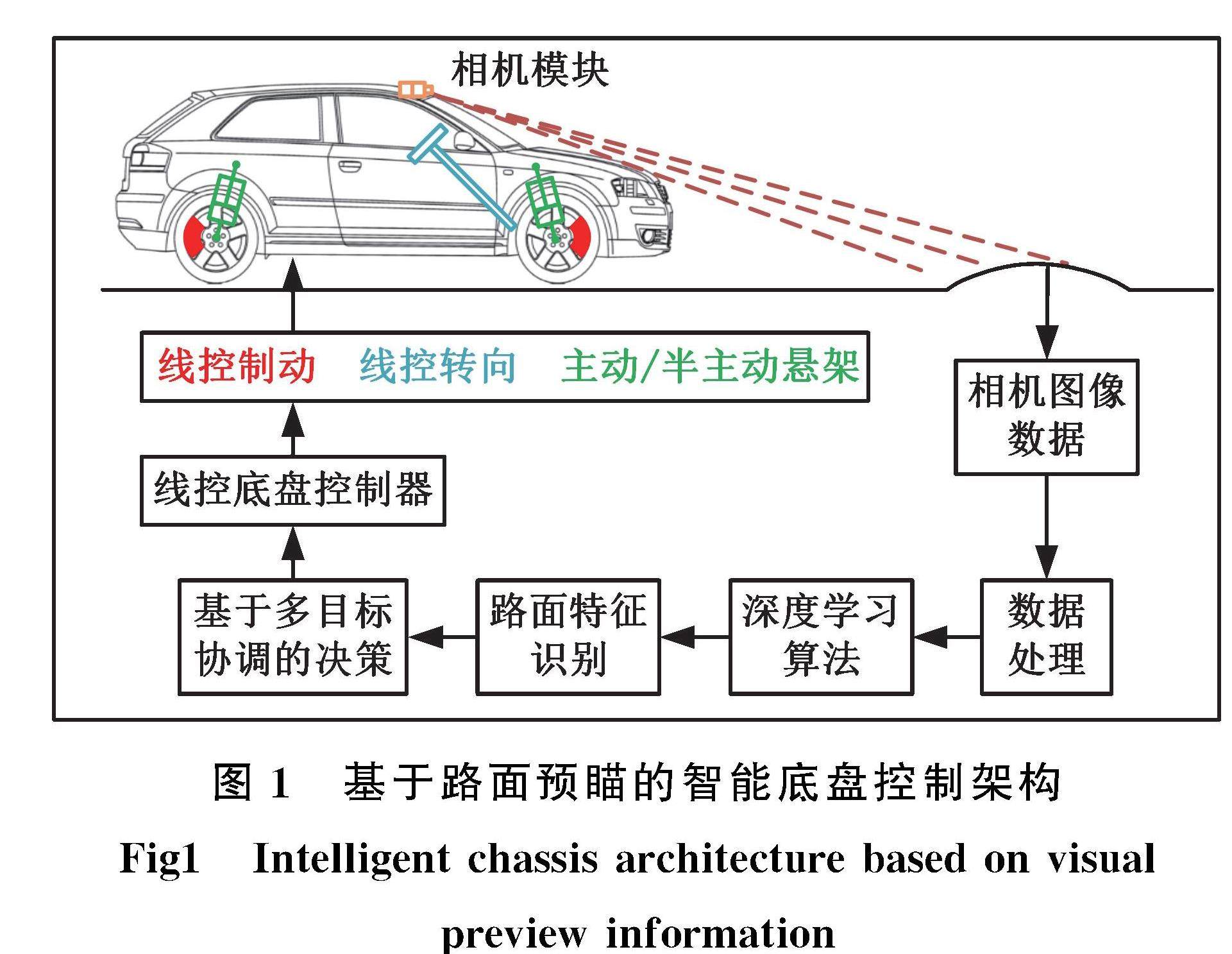
对于智能车辆而言,如果感知设备可以准确快速地检测到车辆行驶前方道路上的凹凸障碍物,那就可为车辆悬架等底盘系统的控制提供重要的预瞄信息,从而实现车辆综合性能的提高和改善。针对路面上常见的凸块(减速带)、凹坑等典型的正负障碍物,提出了一种基于改进YOLOv7-tiny算法的识别方法。首先,在原YOLOv7-tiny算法的三个特征提取层引入SimAM模块,增强网络对特征图的感知能力;其次,在Neck部分采用更为平滑的Mish激活函数,增加更多的非线性表达;再次,使用CARAFE上采样算子替换最近邻上采样算子,使网络更有效地聚合上下文信息;最后,将WIoU作为定位损失函数,提高网络收敛速度以及鲁棒性。(剩余17449字)
