隧道环境内无人驾驶车辆目标决策两级信息融合感知策略

打开文本图片集
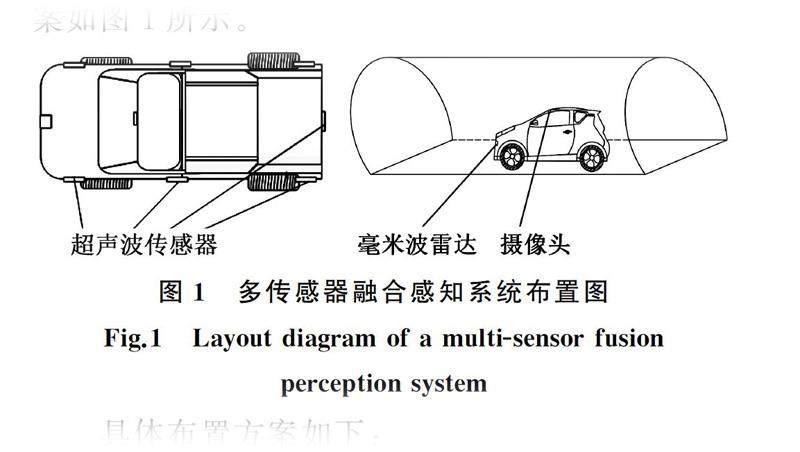
摘要:基于隧道内的特殊行驶环境和无人驾驶感知需求,选择合适的传感器及硬件搭建试验车辆,构建了毫米波雷达与摄像头多传感器融合的感知系统;基于YOLOv4目标级信息融合算法和改进D-S证据理论决策级信息融合算法,提出了一种“目标决策”两级信息融合策略;最后,在城市道路隧道环境内开展了感知信息两级融合验证试验,试验结果表明:相比单一的摄像头或毫米波雷达感知效果,基于摄像头与毫米波雷达传感器感知ROI区域关联实现的目标级融合结果可以提高9.51%的识别准确率,弥补了单一传感器在隧道环境内感知技术的不足;基于目标级融合感知结果,利用改进后的D-S证据理论算法再进行决策级融合,相比于单一的目标级融合结果,误检率降低了3.61%,显著提高了检测精度。(剩余14260字)
