残疾人轮椅智能避障功能创新研究

打开文本图片集
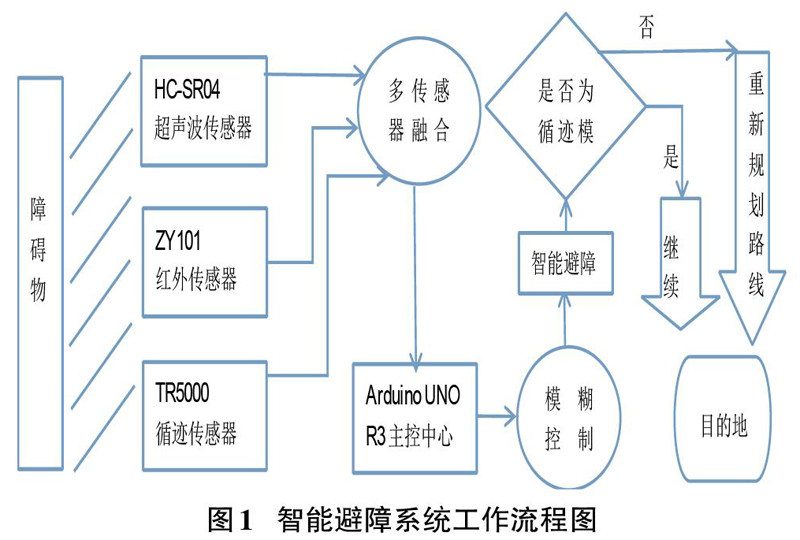
摘要:为研究电动轮椅的智能避障功能,该研究特点在于将HC-SR04超声波传感器和ZY101红外避障传感器相结合使轮椅对环境的感知更加准确,通过多传感器融合技术和模糊控制技术的研究进一步提高避障功能计算的精确度,使电动轮椅在实际行驶中可以自主地完成路线规划并躲避障碍物,更安全便捷地抵达目的地。
关键词:智能避障;多传感器融合;模糊控制
中图分类号:TP18 文献标识码:A
文章编号:1009-3044(2022)05-0014-03
1 研究背景及意义
调查显示,我国现有残疾人、失能和半失能老人超过1.5亿人,从辅助器具的使用量来看,现有为残疾人有效提供急需的救助设施和服务仍然不足。(剩余3692字)
