考虑测量零偏的半挂车辆侧向速度校正估算方法

打开文本图片集
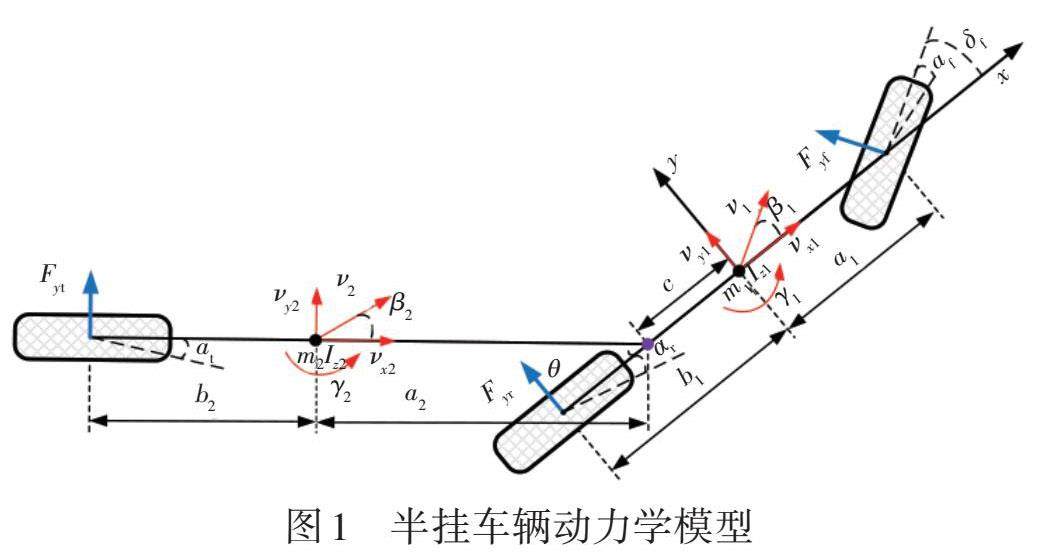
【摘要】为准确估算自动驾驶半挂车辆的牵引车侧向速度,提出了一种考虑传感器测量零偏的校正估算方法。在三自由度车辆动力学模型的基础上,将前轮转角、横摆角速度零偏和侧向加速度零偏等扩围到状态变量中,建立了测量零偏估计模型,考虑到动力学模型失配的影响,设计了基于运动学模型的反馈校正机制,对侧向速度和横摆角速度的估计结果进行反馈调节,利用平方根容积卡尔曼滤波算法实现该方法,并分析了估计器的可观性,最后,基于TruckSim与MATLAB/Simulink联合仿真平台进行了验证,结果表明:该方法不仅可以消除测量零偏的影响,还具有良好的收敛速度,性能明显优于未考虑测量零偏和仅考虑测量零偏的估算方法。(剩余12409字)
