基于双目结构光周视扫描的3D件三维重构与位姿估计研究

打开文本图片集
doi:10.37188/0PE.20253302.0337 CSTR:32169.14.OPE.20253302.0337
Research of 3D reconstruction and position estimation of 3D pieces based on binocular structured light peripheral scanning
CHENG Yao,WU Zhetao*,SHI Xiaoyi,GONG Ao,XU Wenbing,TANG Qingtao (College ofMechanical Engineering, Chongqing University ofTechnology, Chongqing 4OO54, China) *Corresponding author, E -mail:wzt358259428@163.com
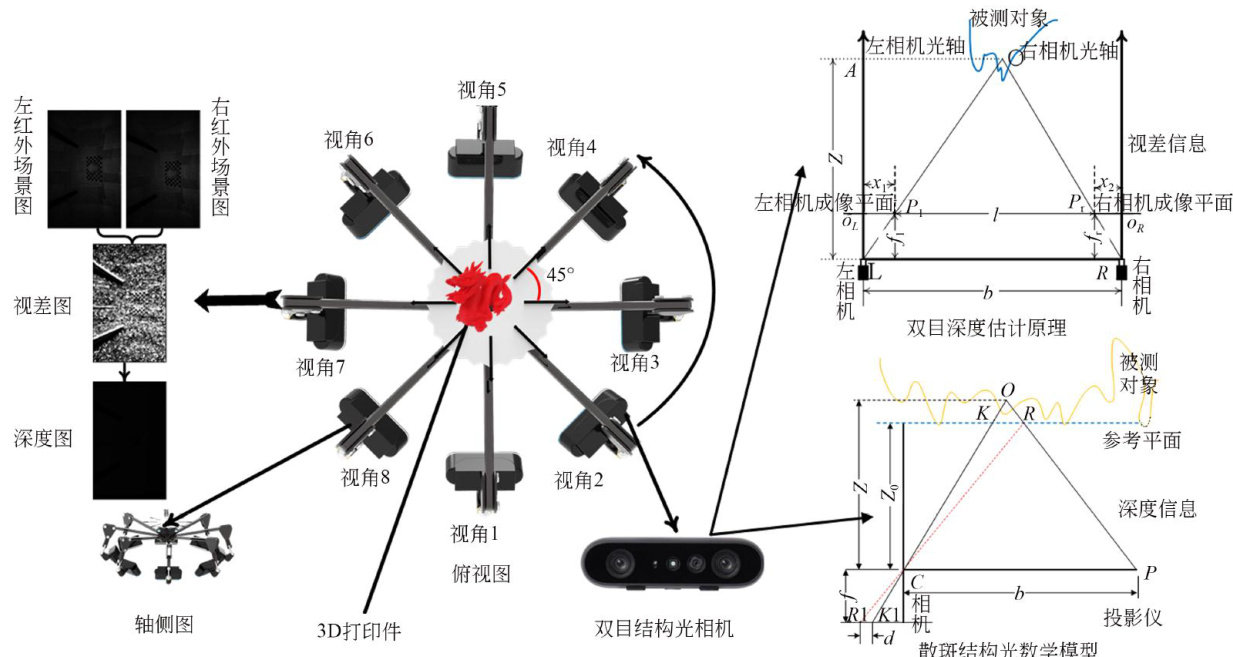
Abstract: In order to realize the detection and control of 3D printed pieces and improve their printing accuracy,the research of 3D reconstruction of 3D parts and position estimation was completed. The system was based on the peripheral scanning visual detection principle of binocular structured light,adopted binocular structured light ilumination,and utilized the peripheral scanning imaging mode of a dual-color camera to realize image acquisition and visual calibration through the color and infrared scene at different positions, binocular vision,and scattered structured light depth information. It completed image processing and analysis,such as image fusion,point cloud coloring,multi-frame point cloud alignment fusion,segmentation, etc.,so as to realize the reconstruction of the object field point cloud.The camera position estimation scheme based on the EPNP and ICP algorithms Was adopted,with the EPNP algorithm completing the coarse alignment of the reconstructed object scene point cloud and single-view point cloud,while the ICP algorithm completed the fine alignment of the reconstructed object scene point cloud and single-view point cloud to obtain the position estimation of the target.The accuracy of 3D printed pieces’3D reconstruction is evaluated by calculating the chamfer distance between the scene point cloud and the standard point cloud,and the average accuracy is 0.675mm ; the accuracy of position estimation is evaluated by the reprojection method,and the average accuracy is 1.669mm . Through the systematic research,a better evaluation method is provided for the printing inspection of 3D pieces,and a better reference is provided for the subsequent inspection and control of the accuracy of 3D pieces.
Key Words : machine visualization; 3D reconstruction; position estimation; image processing;EPNP; ICP
1引言
现今,3D打印技术以及机器视觉技术作为先进制造业的重要技术,在工业制造、医疗等各个领域都被广泛地应用[],但大多并不具备3D打印件检测功能,而机器视觉技术能够利用其机理实现对3D打印件的三维重构和位姿估计等功能,为3D打印系统反馈更多的数据信息,完善3D打印系统。(剩余11219字)