基于SGV-YOLOv8模型的机械零件智能识别与抓取方法

打开文本图片集
关键词:机械臂抓取;机器视觉;激光测距模块;YOLOv8模型;零件识别中图分类号:TP241.2DOI:10.3969/j.issn.1004-132X.2026.02.019 开放科学(资源服务)标识码(OSID):
Intelligent Part Identification and Grabbing Method Based on SGVYOLOv8 Model
LUO Hang YANG Ye*CHEN Benyong School of Mechanical Engineering, Zhejiang Sci-Tech University,Hangzhou, 31001&
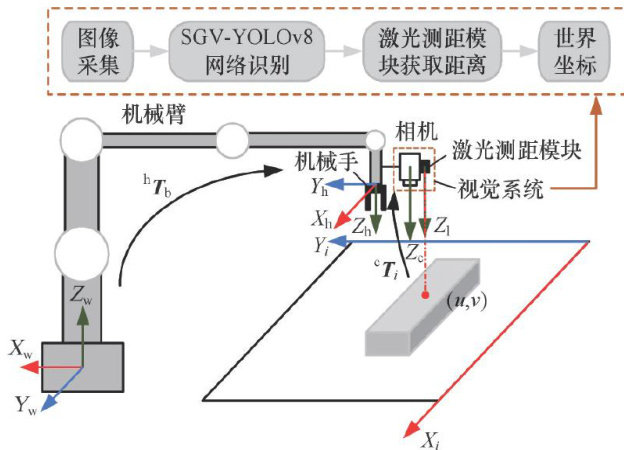
Abstract:To solve the problems of slow part identification and low success rate in grabbing mechanical parts by industrial robots,an inteligent part identification and grabbing method was proposed based on SGV-YOLOv8 model. The monocular camera and laser ranging module were used to build a depth vision detection device to realize the three-dimensional positioning of mechanical parts;Taking the YOLOv8 model as the basic architecture,StarNet network was used in the backbone network to replace the original structure,and GSConv module and VoV-GSCSP structure were introduced in the neck,so as to reduce the complexity of the model and improve the detection speed and capture rate. The experimental results show that compared with the original model,the number of model parameters and the number of floating point operations (GFLOPs) of the designed SGV-YOLOv8 increases 51.9% and 51% respectively , while the number of detection frames per second (FPS) increases 37.6% ; The success rate of part grasping in the constructed industrial robot grasping devices is 80% :
Key words: mechanical arm grab bing;machine vision; laser ranging module; YOLOv8 model; paridentification
0 引言
采用工业机器人实现自动抓取在工业生产中有重要的应用。(剩余14900字)
