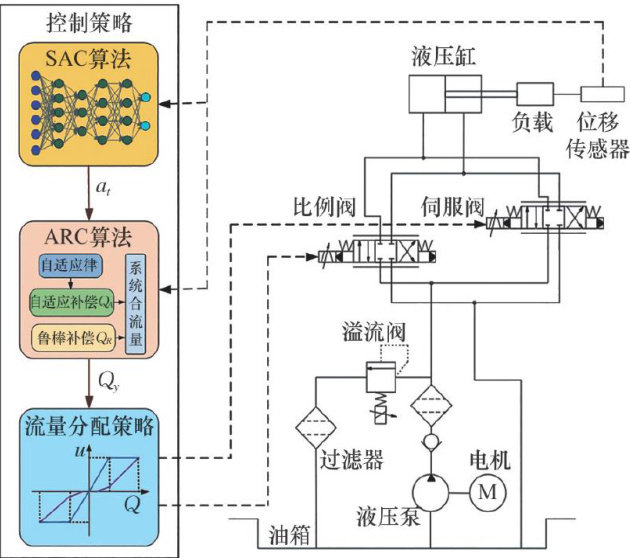
融合强化学习自适应鲁棒控制算法的异构双阀协调控制策略仿真及实验

打开文本图片集
中图分类号:TP273 DOI:10.3969/j.issn.1004-132X.2026.02.005
Abstract:To enhance the control performance a dual-valve electro-hydraulic servo system,this study conducts simulation analysis experimental validation on a proposed coordinated control strategy, SAC-ARC,which integrates reinforcement learning with adaptive robust control. First,a co-simulation model the hydraulic system was established using the AMESim Simulink stware platforms, the tracking performance the dual-valve electro-hydraulic servo system was analyzed under various proportional valve control signal compensation strategies. Subsequently,comparative simulations were per formed to evaluate the tracking performance robustness the SAC-ARC strategy. The tracking errors SAC-ARC were compared with those PID,ARC, RBF-ARC control strategies under complex working conditions,including various composite signals the presence internal external disturbances.Finally,experimental validation was carried out onan established test platform.The simulation experimental results demonstrate that the SAC-ARC control strategy exhibits superior tracking performance under alltsted working conditions. Its maximum transient error cumulative tracking error are both significantly lower than those the comparative control strategies,thus validating the effectiveness superiority the proposed strategy for the dual-valve electro-hydraulic servo system.
Key words: electrohydraulic servo system;dual-valve parallel control; flow allocation;co-simulation
0 引言
为满足当前高端工程装备对大流量、高精度及高动态性能电液伺服系统的需求,如何提升电液伺服系统的输出流量与控制精度逐渐成为该领域的研究热点[1-5]。(剩余11184字)
