基于变轴线运动副3(rU)PU变胞并联机构设计

打开文本图片集
关键词:3(rU)PU变胞并联机构;变轴线运动副;3R-3T运动模式;切换方案;位姿调整中图分类号:TH112DOI:10.3969/j.issn.1004-132X.2026.02.011 开放科学(资源服务)标识码(OSID):
Design of a 3(rU) PU Metamorphic Parallel Mechanism Based on Variable AxisKinematic Pairs
FENG Shengquan1 QU Shuwei1*LI Ruiqin1YAO Wei MA Chunsheng1 1.School of Mechanical Engineering,North University of China,Taiyuan,O30051 2.North of England Robotic Innovation Centre (NERIC),University of Salford, Salford,M6 6AP,UK 3.State Key Laboratory of Computer-Aided Design and Computer Graphics, Zhejiang University, Hangzhou,310058
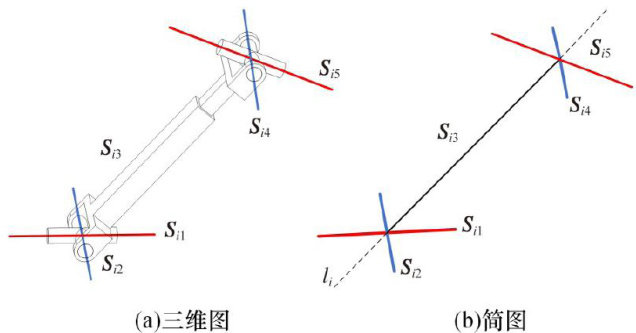
Abstract: The line geometric method of screw theory was used to analyze the geometric relationship among the axes of the kinematics pairs in the UPU limbs,it is found that the constraints of the limbs vary with different geometric relationships. Based on this law,a variable axis kinematics pair(rU) composed of a U pair,a slider,and a slideway was designed.By sliding the sliders on the slideway to drive the U-pair conected with the sliders to slide,a revolute pair axis direction was changed in the U-pair,thereby the geometric relationship among the axes was changed. By replacing the U-pair on the UPU limb with the variable axis kinematic pair(rU),the 3(rU)PU metamorphic paralel mechanism may achieve both three rotations (3R) and three translations(3T). An equivalent plane of the UPU limb was proposed,and the equivalence plane was applied to analyze the degrees of freedom (DOF) of the 3(rU)PU metamorphic mechanisms in motion.A retractable platform was designed to resize the lower platform based on the similarity of equilateral triangles. It was verified by simulation experiments that the metamorphic mechanisms may realize both 3R-3T motion modes. The mechanisms willbe used in position and orientation adjustments.
Key words: 3(rU)PU metamorphic paralel mechanism; variable axis kinematic pair; 3R-3T motion mode;switching plan;position and orientation adjustment
0 引言
并联机构的定拓扑结构和自由度限制了其多功能性和适应性。(剩余16806字)
