面向内河无人艇智能航行的4D毫米波雷达-摄像头融合算法

打开文本图片集
中图分类号:TN958;U664.82 文献标志码:A 文章编号:1673-2340(2025)03-0044-08
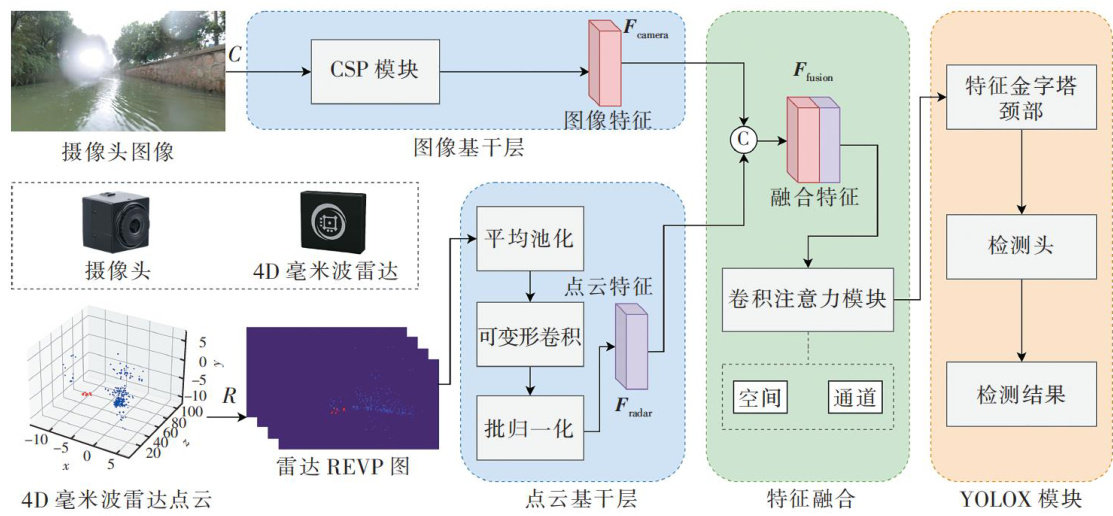
Abstract: Inland unmanned vessels demonstrate significant application value in environmental monitoring,water rescue,andtransportation. However,their perception systems face critical challenges including water surface reflections, adverse illumination,andvariable weatherconditions.Currnt aquatic perception research primarilyrelies on camera orlow-resolutionradardata,which fails to meetmultimodal sensing requirements incomplex scenarios.To addres thesechalenges,thisresearch proposesa4Dradar-camera fusion solution.Wefirstconstructamultidimensional featurerepresentation system for 4D radar that dynamically extracts key features including distance,azimuth,velocity, andreflection intensity.Subsequently,we designa dynamic scene-adaptive cross-modal fusion mechanismthat employsattention-basedweighting toeffectively integrate diferent modal features,enablingreal-timeadaptivealgorithmstohandleenvironmental variations.The heterogeneoussensorsare then deeplycoupledatthe feature level throughacarefullydesigneddeeplearningmodel.Experimentalvalidationdemonstratessignificantimprovementsin environmental adaptability,with the proposed fusion solution achieving target detectionaccuracyimprovementsof 3.4 and3.9 percentage points over traditional vision systems under poor lighting and harsh weather conditions, respectively.Thisresearch not only providesan effective technical solutionfor intellgent perception incomplex aquaticenvironments,but alsoadvances thedevelopmentof inlandunmanned vessels toward intelligent and autonomous operation.
Key words: inland unmanned vessels;4D radar-camera fusion;autonomous navigation; multi-sensor fusion;complex environment perception; feature-level fusion
近年来,自动驾驶技术在道路、空中和水面等多个领域取得了快速发展,实现了更安全、高效和可持续的交通运输方式[1-3]。(剩余14320字)
