大型车载光电望远镜伺服系统扰动抑制

打开文本图片集
关键词:光电望远镜;扰动抑制;伺服控制;观测器
中图分类号:TM351;TP273 文献标识码:A
doi:10.37188/OPE.20253321.3419 CSTR:32169.14.OPE.20253321.3419
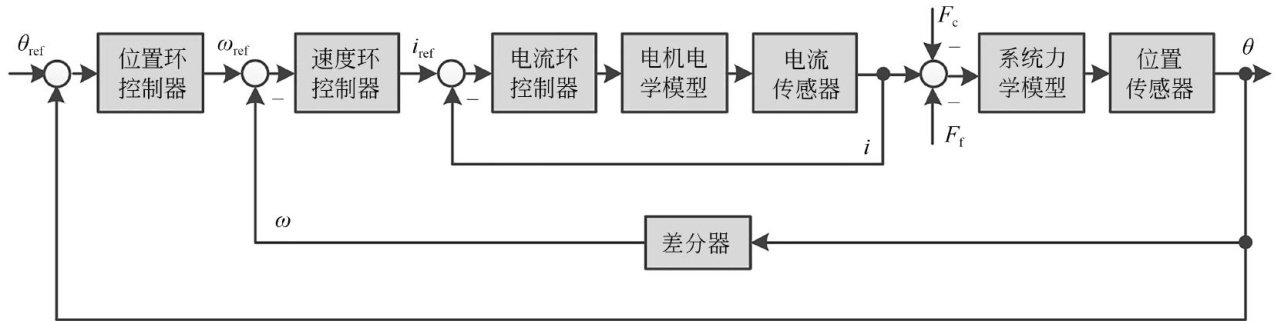
Abstract: The servo system of a large vehicle-mounted electro-optical telescope is afected by time-varying disturbances,such as motor cogging torque,which degrade tracking performance. To enhance the disturbance rejection capability of the telescope servo,current and speed control loops were first designed. Based on this control architecture,methods employing direct current compensation and observer-based feedforward compensation were compared for mitigation of periodic and time-varying disturbances induced by cogging torque. Their practical limitations were analyzed,and an online disturbance estimation and compensation method was proposed,combining extended state observers with compensation and prediction models to suppress tracking fluctuations caused by disturbance torque. The proposed approach was validated through simulation and experiments. When following a 1(∘)/s speed command,the RMS of the speed fluctuation error was reduced from 0.00760(∘)/s without compensation to 0.00345(∘)/s ,arelative decrease of 54.6% . When tracking a position slope command at 1(∘)/s ,the RMS of the position tracking error was reduced from 0.997′′ without compensation to 0.157" ,a relative decrease of 84.3% : The results demonstrate that the presented method efectively improves the disturbance rejection performance of the servo system for large vehicle-mounted electro-optical telescopes.
Key words: electro-optical telescope;disturbance suppression; servo control; observer
1引言
机动式车载光学望远镜是一种能够执行特殊用途的地基光学望远镜系统,相较于固定站的地基光电望远镜系统,车载望远镜具有部署灵活,机动性好的特点。(剩余12520字)