基于RobotStudio的机器人搬运码垛虚拟仿真平台

打开文本图片集
本文引用格式:邓华军,段月红,卢培文.基于RobotStudio的机器人搬运码垛虚拟仿真平台[J].自动化与信息工程,2023,44(1): 27-32.
DENG Huajun, DUAN Yuehong, LU Peiwen. Virtual simulation platform for robot handling and palletizing based on RobotStudio[J]. Automation & Information Engineering, 2023,44(1):27-32.
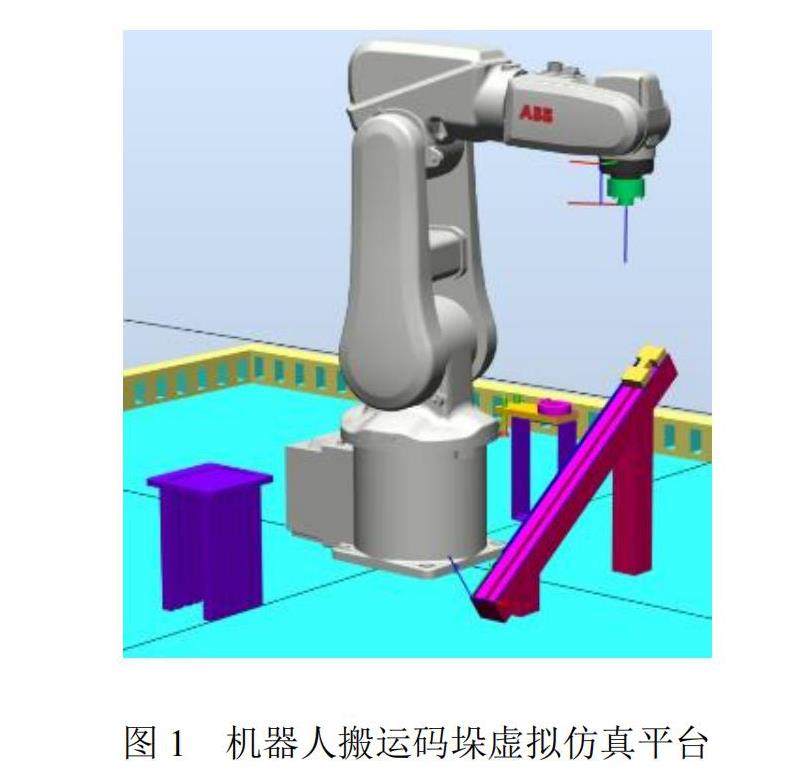
摘要:以机器人搬运码垛平台为研究对象,通过SolidWorks软件建立该平台的三维模型;利用RobotStudio软件设计动态物料输送链、动态快换工具和动态真空吸盘3个Smart组件,分别用于模拟机器人搬运码垛平台的物料运动、吸取/释放物料和装载/卸载吸盘,并虚拟仿真机器人搬运码垛的工作过程。(剩余7582字)
