基于干扰观测器的倒立摆抗干扰反步控制研究

打开文本图片集
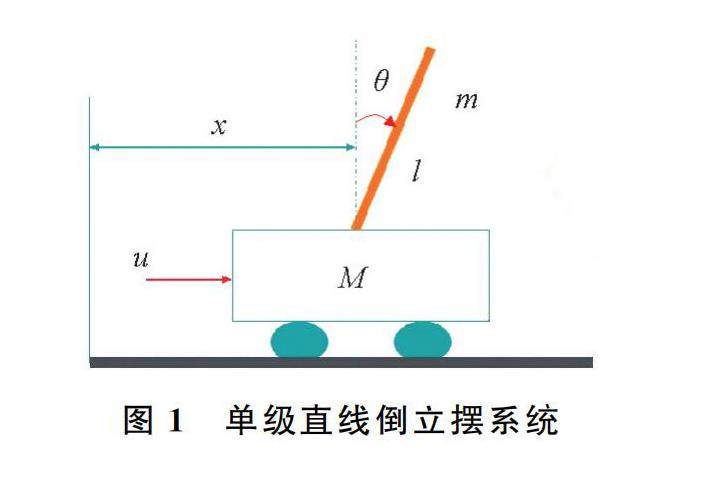
摘要:针对单级直线倒立摆欠驱动性和易受干扰的特点,提出一种基于干扰观测器的倒立摆抗干扰反步控制方法。建立单级直线倒立摆系统的非线性数学模型,将其改写为受干扰时的形式。由于单级直线倒立摆的欠驱动性,当单级直线倒立摆的摆杆受到不确定干扰时,摆杆自身不能调节,需通过小车的位置运动间接调节控制,因此设计了非线性干扰观测器,对干扰进行实时估计,并基于干扰估计值和反步控制方法,利用 Lyapunov 稳定性理论,设计系统的虚拟控制量和控制量,得到基于干扰观测器的倒立摆抗干扰反步控制器,实现对干扰的抑制。(剩余8914字)
网站仅支持在线阅读(不支持PDF下载),如需保存文章,可以选择【打印】保存。