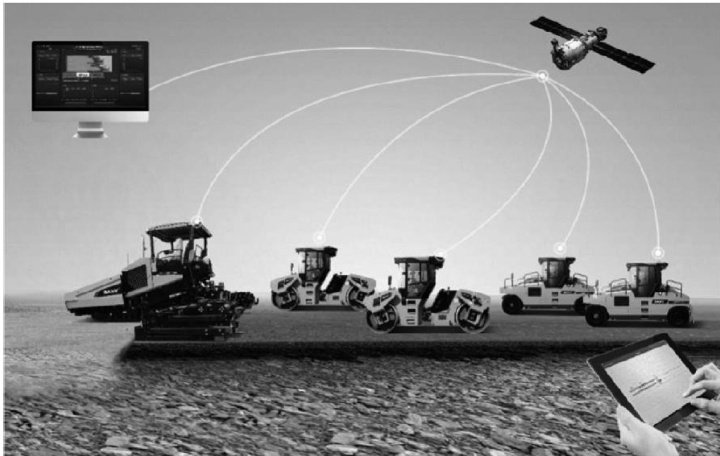
面向无人摊压机群作业的异构网络通信架构设计与实现

打开文本图片集
中图分类号:TN91 文献标志码:A 文章编号:2095-2945(2026)10-0116-04
二十世纪九十年代,卡特彼勒等企业开发基于惯性导航系统的无人驾驶工程机械,并融合无线通信技术实现远程控制,较早地形成技术体系。随后其技术已在矿山与基建场景中规模化应用,验证了通信协同的可靠性。国内研究虽然起步较晚,但近年发展迅速,“三一""柳工"等企业自2018年起陆续推出基于无线通信的无人摊压机群和远程遥控产品并快速实现商业化。(剩余4059字)