基于特征融合的无人驾驶多任务感知算法

打开文本图片集
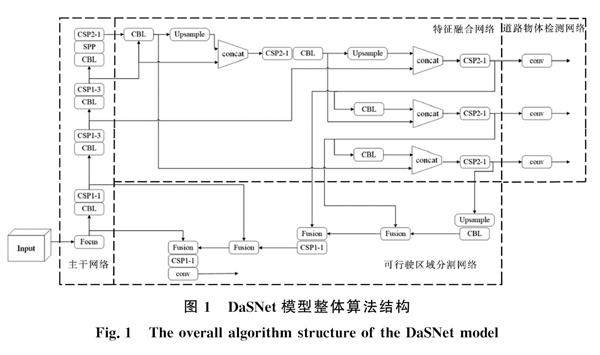
摘要: 为提高无人驾驶汽车感知系统硬件资源利用率,构建了一种基于特征融合的无人驾驶多任务感知算法。采用改进的CSPDarknet53作为模型的主干网络,通过构建特征融合网络与特征融合模块对多尺度特征进行提取与融合,并以7种常见道路物体的检测与可行驶区域的像素级分割两任务为例,设计多任务模型DaSNet(Detection and Segmentation Net)进行训练与测试。(剩余12618字)
网站仅支持在线阅读(不支持PDF下载),如需保存文章,可以选择【打印】保存。